Yesterday I finished the assembly of my first drone based on navio2 and RP3+.
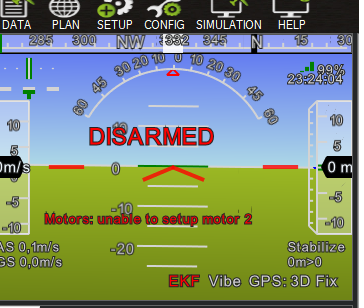
Although I was able to arm the drone, I got a message telling me Motors 2 and 4 do not run.
1. All of the mandatory calibrations have been done on MP.
2. I checked all of the ESC-motor combos via connecting to only remote controller one by one. - All works fine without problem.
3. ESC calibrations done.
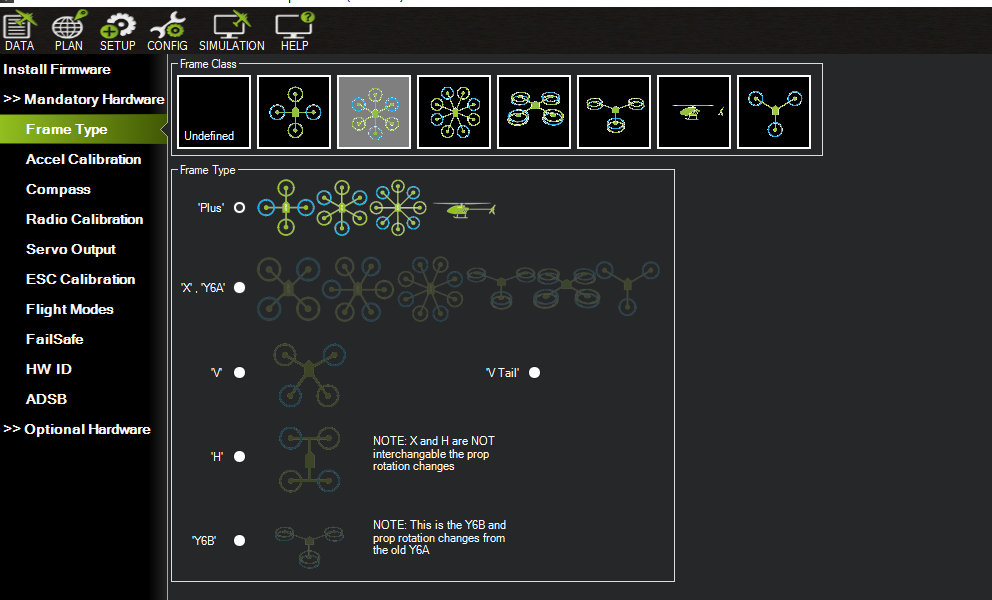
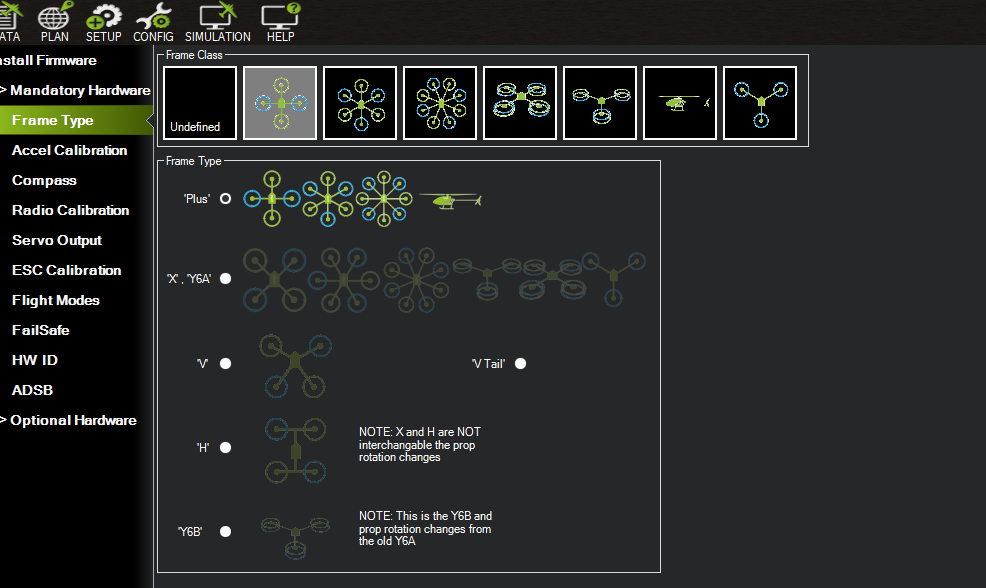
I changed the Frame type to see if any of the motors starts spinning.
If a different frametype than quad is chosen like octo,hexa —> 3 of the motors run. (3/4)
When the frametype is selected quad —> 2 of the motors run. (2/4)
I dont know why this happens, maybe reinstall the ardupilot?
Looking at the picture, I believe to see only two ESCs connected to the Navio. Is that the case?
And I see a very sharp bend in the GPS antenna cable. This is an HF cable, it might not work or even get damaged if bend to sharply.
@amilcarlucas yes I did calibrate the ESC. Moreover, lets assume the Motors 1,2,3 are working and 4 is not working. When I swap the motor pins 3 to 4, BAM- motor 4 starts to spin but motor 3 stops. So it is about the signal from the Navio.
yes I also tried to use motor test command in Mission Planner. It is the same, some motors run, some does not.
I changed the configuration to 5,6,7,8 and nothing changed. Just on quad frametype no motors were spinning. But on the octo frame -again- 3 of them were spinning.
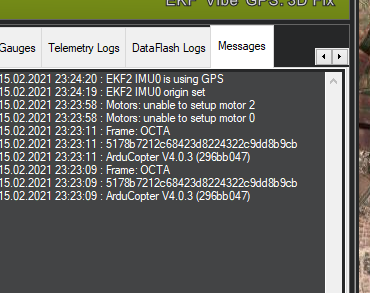
I could get the messages;
I did change the servor output configuration as follows too;
This is on half throttle, the non working motor is connected to number 6 (before restart).