romaster93
February 9, 2021, 8:21am
1
I am trying to hovering my drone in gazebo using orb slam2.
the slam pose value and local_position/pose value are created well.
However, it cant maintain its posture at 0,0.
Do you have any idea what is the problem?
we used GUIDED MODE at ardupilot and use arm throttle & takeoff 2 command
this is slam picture
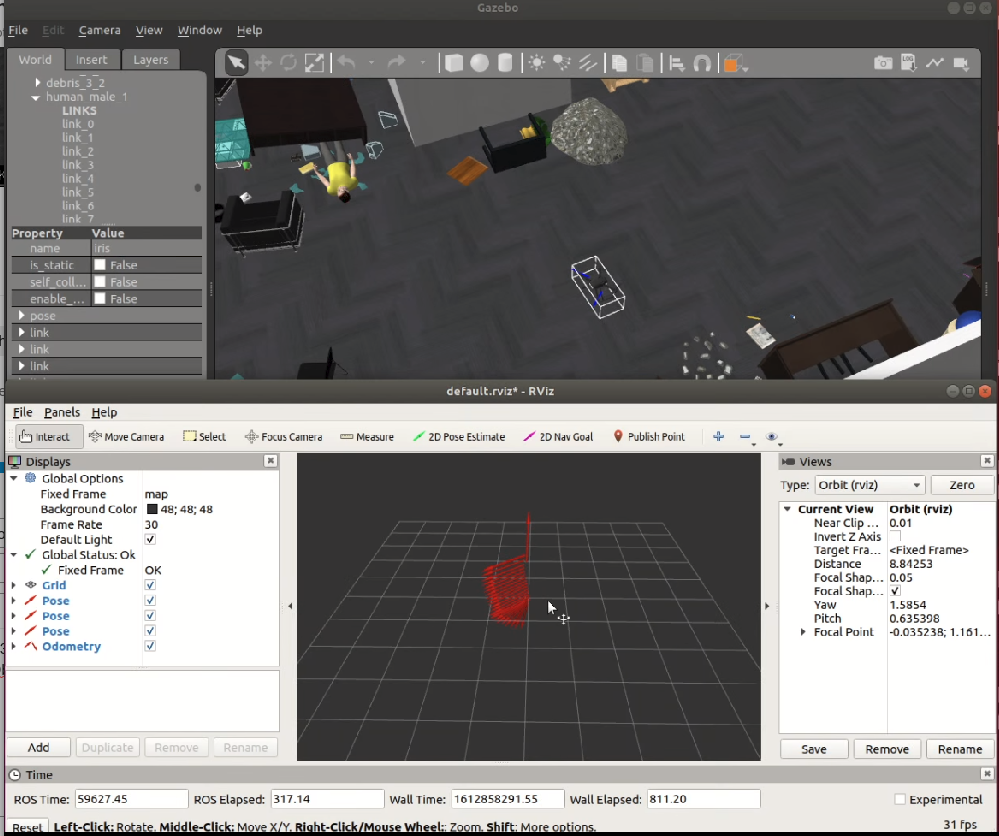
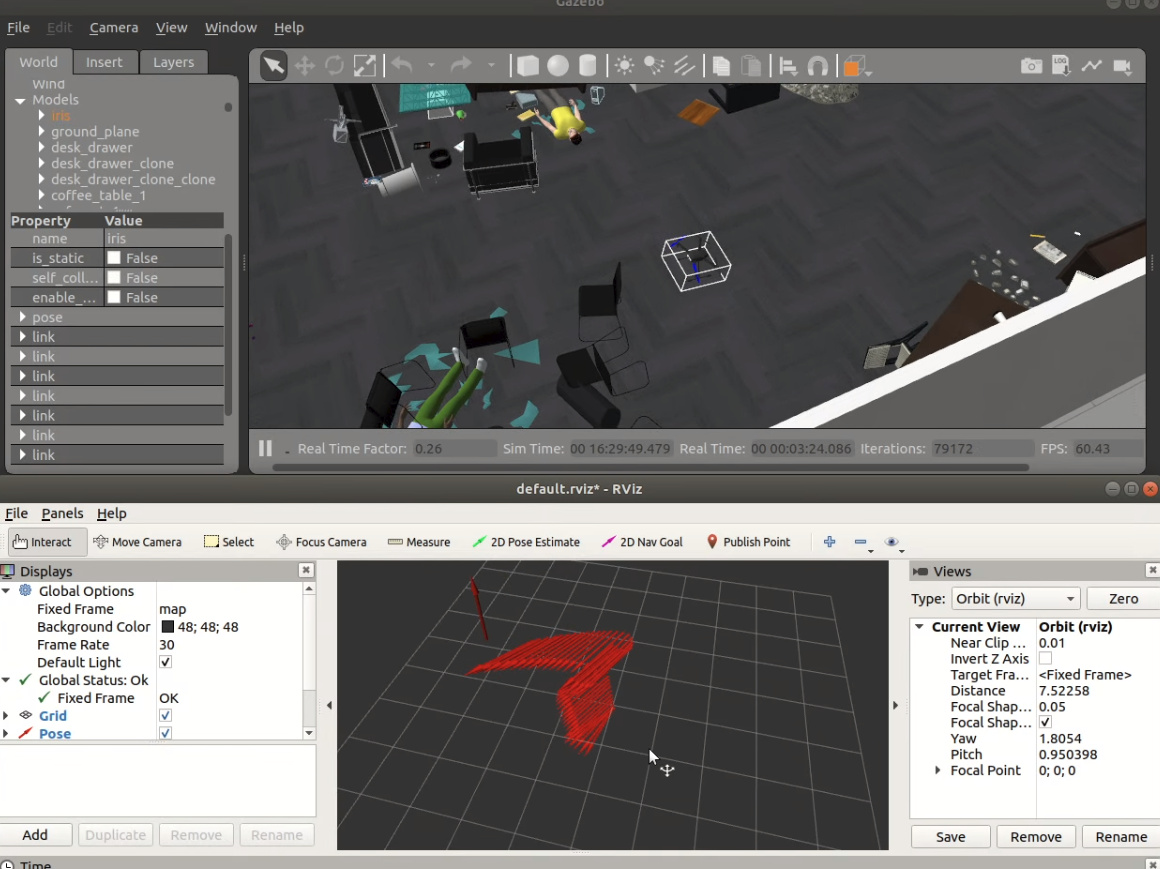
this is pose rviz picture
drone cant hovering
You need to use ArduCopter 4.1.0-dev version for that. You need to use EKF3 and have it properly configured.
romaster93
February 9, 2021, 10:09am
3
now i use ArduCopter 4.1.0-dev.
but I tried to use EKF3 before, but the home position set is still rejected.
This is my parameter file.
Onboard parameters for Vehicle 1
Stack: ArduPilot
Vehicle: Multi-Rotor
Version: 4.1.0 dev
Git Revision: dbae56eb
Vehicle-Id Component-Id Name Value Type
1 1 ACRO_BAL_PITCH 1.000000000000000000 9
romaster93
February 9, 2021, 10:10am
4
I would like to send you my simulation video. However, I cannot upload videos here because of the oversize. Is there any way?
You need to upload the video somewhere, and post a link here.
romaster93
February 9, 2021, 11:07am
6
and
this.
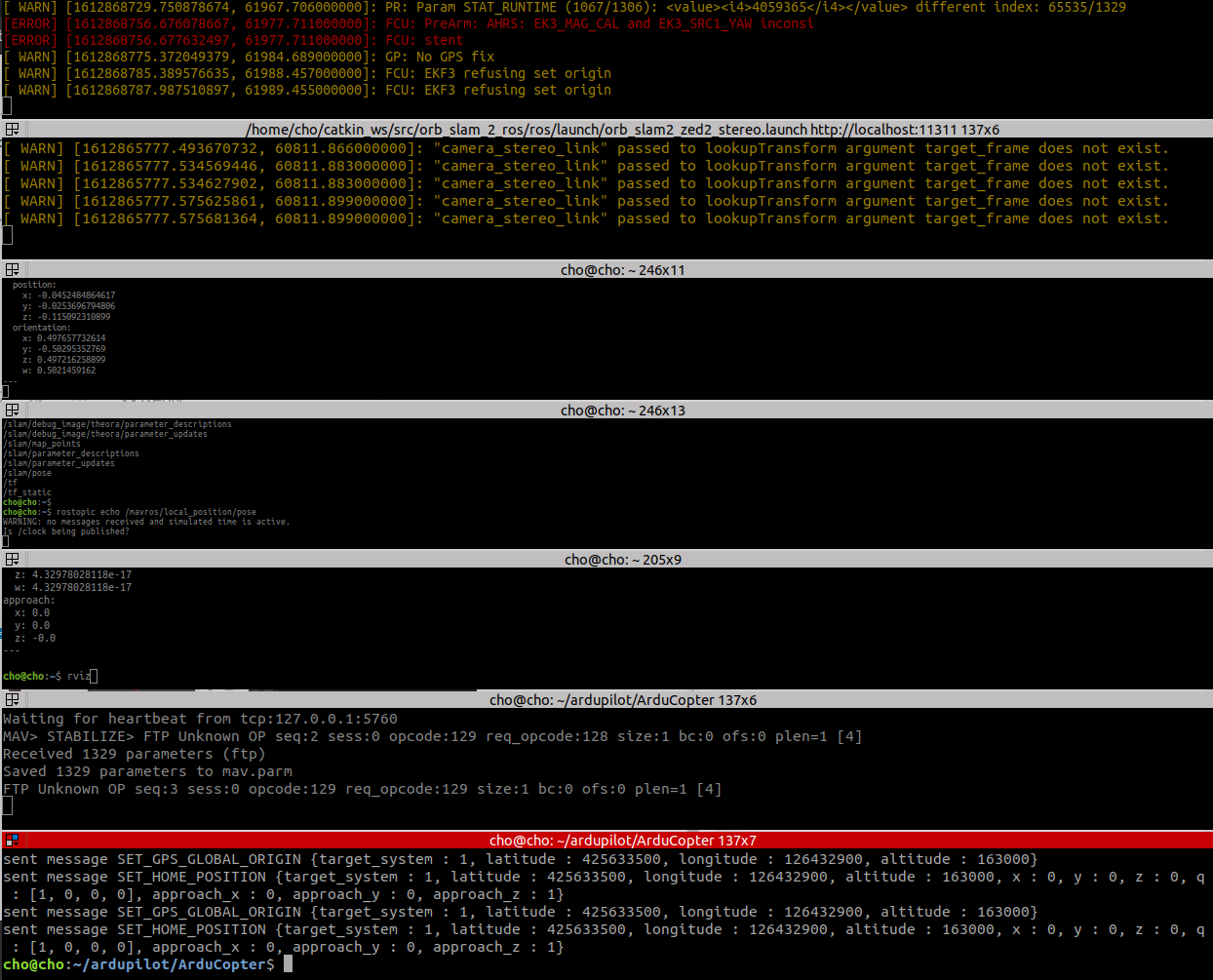
and now i try run a orb slam2 using ekf3, but ekf3 refusing origin error is occur.
@rmackay9 do you have any ideas?
rmackay9
February 10, 2021, 12:01am
8
A onboard log file would be best of course. Videos are ok but they don’t really give a lot of detail of what is going on inside AP.
AP will refuse setting of the origin if the GPS is enabled. I suspect some of the EK3_SRCx parameters haven’t been set correctly. Probably some of them are still “3” which is for GPS.
We should probably allow the EKF3 to accept an origin even if GPS is configured because the vehicle may initially be somewhere that it cannot get a GPS fix.
By the way, the setup should be similar to the setup of the T265 which is described here on the wiki . You probably want to keep VISO_TYPE = 1 instead of “2” which has some specific features for the T265.
It might also be good to drop into the “vision-projects” channel in discord (see link here )
romaster93
February 10, 2021, 4:07am
9
Can I leave questions freely on the discord channel?
rmackay9
February 10, 2021, 4:26am
10
@romaster93 ,
yes, especially in the vision-projects chat we try to help users setup the system because it’s still fairly new.