After several issues with pre-arm failures on my sonar survey boat after a firmware update I still can’t change the mode from Manual to Auto - it forces itself into HOLD.
Any help will be much appreciated.
Made the following changes:
ARMING_CHECK = was 1 (All) changed to 72 (GPS lock only, no RC failsafe)
ARMING_REQUIRE = was 1 (THR_MIN) to 0 (Disabled)
Result:
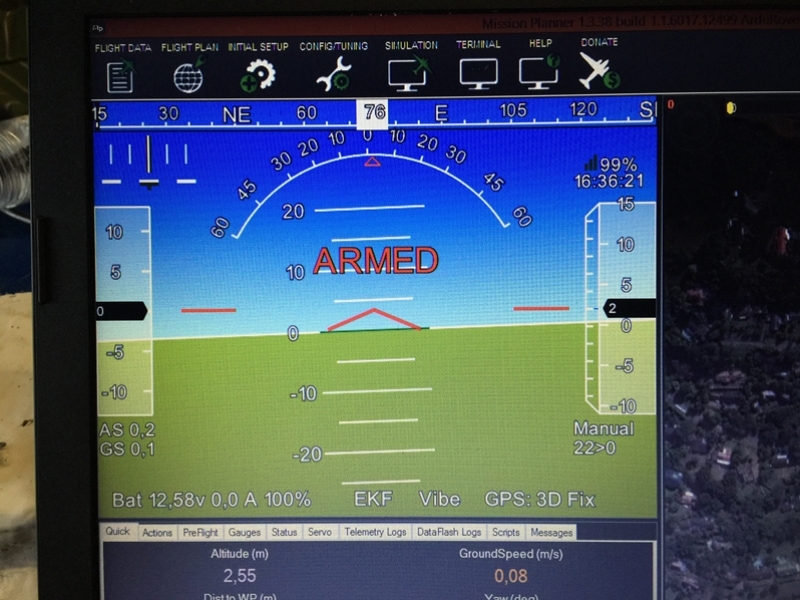
LED = Solid Green (Armed GPS Lock)
Switch = Solid Green (Armed)
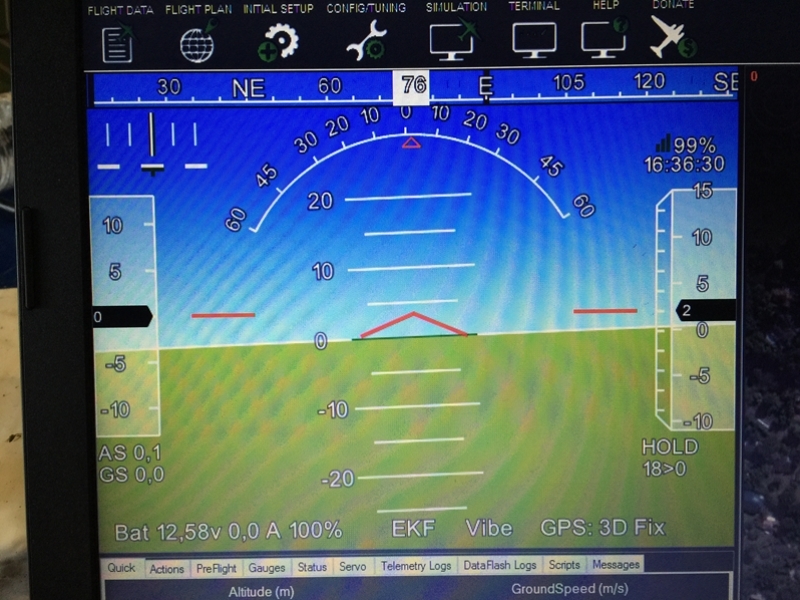
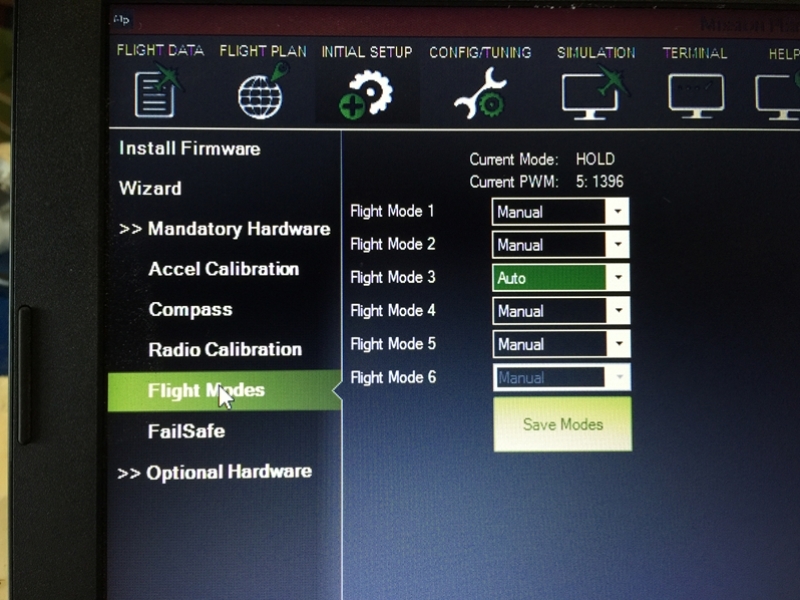
Mode = Manual (All works fine) Auto - still won’t go into AUTO forces into HOLD
I have read up on the following -
_"When and where tlogs are created: - _ Tlogs are recordings of the MAVLink telemetry messages sent between the APM/PX and the groundstation and are automatically created the moment you press the connect button on the mission planner. Files of the format YYYY-MM-DD hh-mm-ss.tlog appear in the “logs” subfolder in your Mission Planner installation folder or to the location you select in the Planner options [Config/Tuning] [Planner].
Besides the ”.tlog” files, ”.rlog” files are also created. These contain all the .tlog data plus additional debug output from the mission planner. but cannot be parsed or played back so they should be ignored."
I have found this /logs/ folder but it does not contain tlogs related to today’s date, only one rlog.
If you do a RESET DEFAULT SETTINGS, you must remember to re-load / write the mission to the Pixhawk otherwise there are no waypoints to go to.
Note:
I did suspect this some time back, so I created a little test mission, but I forgot one very important step - I forgot to ‘write’ it to the Pixhawk - Doink!
Hahaha, I wish I had read this post before heading to the lake today.
When it went into Auto it somehow had remembered my last mission (small test mission created at my home) and decided to shoot off in that direction and by the time I realised I was out of radio range. Took me the whole morning to locate a boat and go recover it.
New prop ruined, impeller filled with sand and seized, not sure about the motor itself.
Sorry to read about this!! I try and reply knowing that you are about 7 hours ahead of me here in Florida. ALWAYS read the mission before switching to AUTO. Those of us who also fly things learn this very early on. At least you still have the boat. We that fly also are not that lucky!
Also remember to “Restart Mission” after every mission completion if you intend to do the same mission. Otherwise it will stay in Hold after it completes.