Hey everyone.
I’m trying to set up my ESCs to work with my rover, but I can’t connect to BLHeliSuite 32 to do so.
I’m working with a cube black with ArduRover 4.1. I have an ESC F35A-32bit 3-5S from T-MOTOR.
I managed to connect to BLHeliSuite 32 with a cube black with ArduCopter 4.0.7 once, but since I can’t reconnect. I know I could just flash arducopter on my cube, load my parameters and set my escs from there, but I would like to understand why it doesn’t work with ardurover. Also, i tried to connect from arducopter, setting up parameters manually, but I wasn’t able to reconnect, even if I think all important parameters were set. I needed to found my old parameter file to make it work. I compared everything, and all parameters mentionned there : https://ardupilot.org/copter/docs/common-blheli32-passthru.html were set correctly.
Could anyone help me to understand what’s going on ?
TL;DR : I can’t connect to BLHeliSuite 32 from Ardurover 4.1 with the two last sets of parameter :
I’d like to understand what’s wrong with my two param files that don’t work.
Here is my old param file that works with Arducopter :
copter_connection_blheli_last.param (16.6 KB)
Here is the new one that doesn’t work (with ArduCopter) :
copter_blheli_not_working.param (17.5 KB)
Here is the one (that doesn’t work) with Ardurover :
rover_blheli_not_working.param (14.3 KB)
And finally what message i get from BLHeliSuite 32 in both last cases :
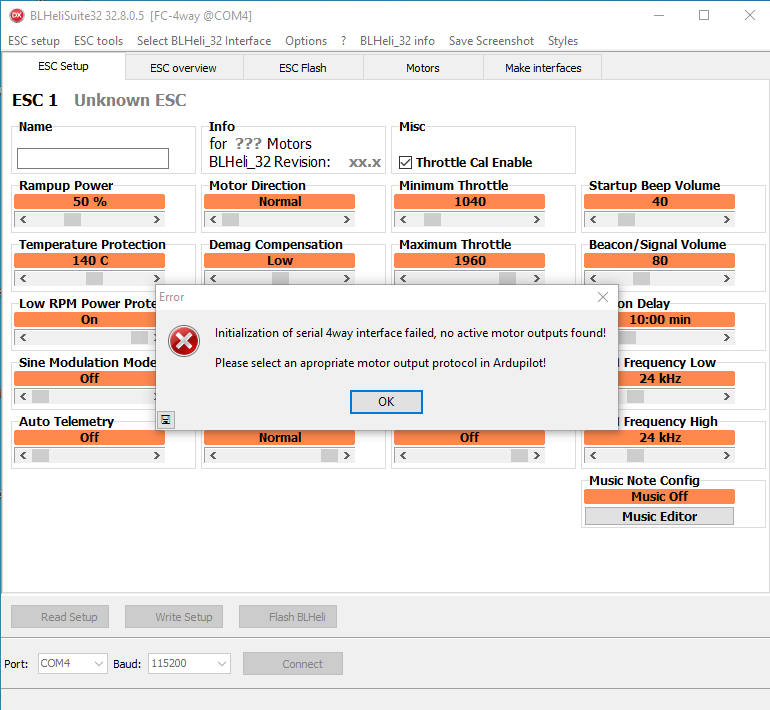
 !
!