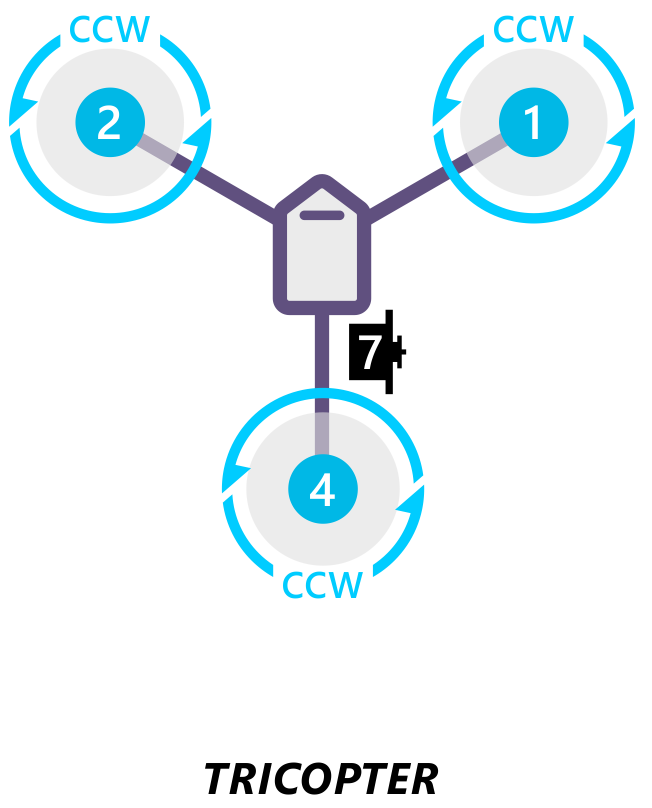
I’m using a Pixhawk 2.4.8 with Arduplane V3.9.6, and can’t seem to get the rear motor going. I’ve got it setup on SERVO7_FUNCTION,35. But in MP under the Servo Output tab, I only get PWM showing on positions 1-6, nothing on 7. Motor 3 shows as a function for position #7.
Once while connecting to MP I got the following message:
QuadPlane initialised
MotorsTri: unable to setup yaw channel
Motors: unable to setup motor 3
Not sure what to try next. I can arm with MP, and can get the front motors going, as there is a PWM going to outputs 5 & 6.
Parameter file:
https://drive.google.com/open?id=1NnIyUNbDAPuTjwPUd5uVMiLsf4f6JDP6