Hello,
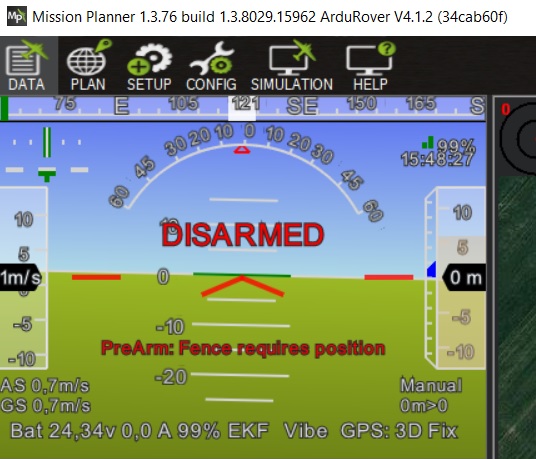
When FENCE_ENABLE is enabled, I can’t arm the rover in manual mode if I don’t have a GPS signal (e.g. indoors), I get a “Prearm: Fence require position” alert.
Is this normal?
Setup: Orange Cube, firmware Rover 4.1.2
Hello,
When FENCE_ENABLE is enabled, I can’t arm the rover in manual mode if I don’t have a GPS signal (e.g. indoors), I get a “Prearm: Fence require position” alert.
Is this normal?
Setup: Orange Cube, firmware Rover 4.1.2
Sure it’s normal. W/O a position estimate the Fence can’t function so the failsafe is it won’t arm. In fact many people use this function as a feature to determine if there is a proper position estimate before flight.
OK I understand.
My rover is driving on agricultural fields and for safety, I want to use a polygon fence which delimits the field.
To bring the rover to the field, I use a van because it weighs more than 120 kgs.
It’s problematic if I can’t arm the rover in manual mode to get it out of the van.
Do you think there would be a solution to overcome this, because FENCE_ENABLE has no interest in manual mode.
What do you think ?
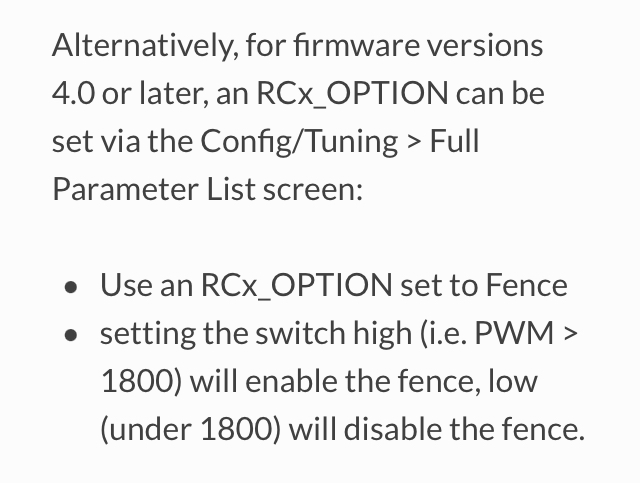
Use a Fence enable/disable switch.
I have a very similar issue and solved it by simply disabling all arming checks. It’s an ugly fix, but it’s also the only readily available one for enabling fences and also allowing for motion control without a good position estimate (for moving off of an enclosed trailer or out of a garage).
I’ve been considering using a Lua script to disable fences on boot up until the position estimate is received.
Thank you for your answers !
I will try to use a fence enable/disable switch, I prefer to keep arming checks
That sounds like the best answer for you. I actually wasn’t aware of that particular RC option setting until reading this topic.
Still, I prefer not to use an RC channel solely for that function, so I will pursue a scripted option for my own use.