Alright thanks, Any other thing that you notice that was off? That i need to get right?
Also as described earlier, what is the 207 on h location marker and why is the location always drifting even when the quad is in a statioanry position and not even armed.
If there was I would have added it previously.
I don’t know what you mean by 207 or where you saw it but it’s normal for the crafts position to drift around with the hardware you have
If you go in altitude of the log, you can see the graph starts from 200.
I am seeing 207 on the H pin in the map of mission planner. Is it the altitude?
I guess you are looking at GPS altitude? It’s ASL. Use Baro>Alt for home position based altitude.
Okay, and does the home location get reset everytime I arm my drone? Coz the home location always shows on top of a building adjacent to my place of flight.
And what do I see in my log review that large magnetic offset was seen, it should range between this and this. Is this matter of concern?
…
Yes.
Okay, also dave, i have made the necessary pid value changes, will get a flight tmr morning first thing. These are pre tuning what we are doing If I’m not wrong.?
And how to know which type of esc’s am i using like dshot or normal, they are just regular red colours 30amp esc’s
Yes, pre-tune. After the notch filter is configured and Auto Tune completed then you can say it’s been tuned. But, those Vibe levels will compromise a good tune. If you are using a vibe mount now there isn’t much more that you can do on those frames, they are simply not rigid enough.
Those are PWM only, Dshot not available. I would suggest you replace them with a BLHeli_32 4in1 or single ESC’s at some point.
Evening dave.
What is notch filter and how to configure it?
Also what exactly you tell me to do to complete the pre tune, just to change those pid values?
How does one know the quad has been tuned?
When you say the vibe levels will compromise a good tune, are you referring that having vibe levels are good to have? Or the pid values you have suggested go inhand with the vibe levels my quad has.
And what do I see in my log review that large magnetic offset was seen, it should range between this and this. Is this matter of concern?
Regards.
Hi Dave,
when you say same for roll what do you mean and where can i find the param for ATC_RAT_ROL

Also dave, what is GSC FS enable in failsafe?
You need to read the documentation. I would just be repeating what’s already available with these basic questions. For example:
Google “arducopter notch filter” and “arducopter gcs fs”.
Ignore the out of range message and enter the value.
1 Like
Here are the flight logs after the changes you asked to do:
https://drive.google.com/drive/folders/1Gv4Bb8WlMuELfAB41wAF7tMBjxq7MjGl?usp=sharing
Requesting you to pls review.
The quad was not stable, even in stabalize mode, the quad drifted immensely, I switched to loiter to check, the performance was more poor. Though the quad held it’s position but not lock stable, it was drifting, lossing altitude etc. There’s a persistent wobble in the quad, and at the end it always looses throttle and comes ramming down on the ground, I am guessing it is the battery.
One more thing dave, the throttle drop and altitude drop is not at all smooth, meaning, when i lower the stick the quad wobbles immensely leading to loosing balance and toppling on the ground. I have uploaded some videos too in the drive folder for your reference.
Your insights always help me to grow.
Regards.
The vibe levels are still high of course. And you didn’t lower the Rate Roll PID’s.
So make these changes to both Pitch and Roll (Pitch shown):
ATC_RAT_PIT_D,0.0015 (and same for Roll)
ATC_RAT_PIT_I,0.08 (and same for Roll)
ATC_RAT_PIT_P,0.08 (and same for Roll)
And set these Notch filter parameters. Enable it 1st then refresh parameters to show the rest:
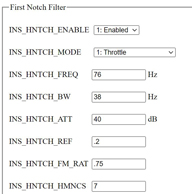
This is not a fix for high levels of vibration but it might help until you balance the props.
I did lower them, but didn’t know how to get the “same for roll” pls explain, also, I just saw that the videos finished uploading, Now you can see them.
And I also asked you about that why at the end the quad comes ramming down on the ground. Is it the battery?
Either the battery or “non-wind calibrated baro”.
Calibrate both the ballery voltage and current sensor and the “wind estimation” parameters
Same parameters but RLL instead of PIT. Isn’t that obvious?
Why don’t you plot the battery voltage in the log and see for yourself? We are here to help you help yourself not hold your hand thru every step. When you do you will find the battery voltage down to 7.5V so you are killing it.
Ok, I was trying ROL instead of this. I will update this.
Yes, I saw the battery voltage graph as well, this was my first time analysing logs. Wasn’t sure, so asked.
Killing as in killing the battery, or doing great?
Discharging a Lipo battery to 2.5V/cell will destroy it. Doesn’t look like it started with a full charge.