Hardware Config:
- Kakute H7 Mini with Copter4.3.6
- Mtf-01 optical flow and range finder module.
I’m trying to fly with loiter mode with ekf2, however I failed to disarm in Loiter mode and encountered this error message: Prearm: Need Position Estimate:
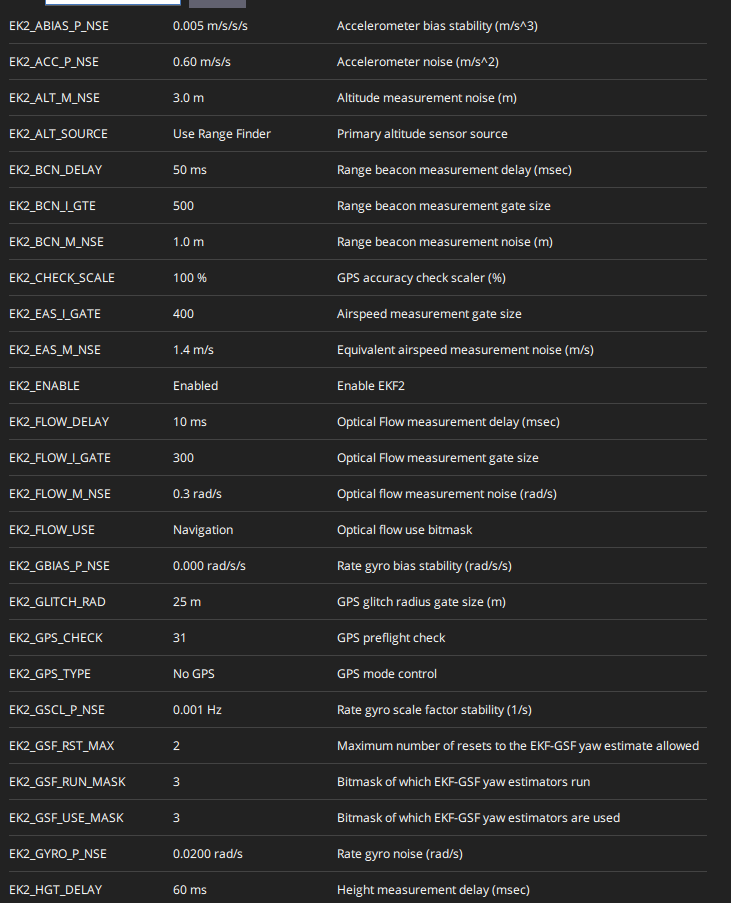
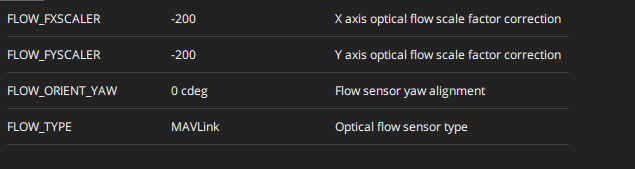
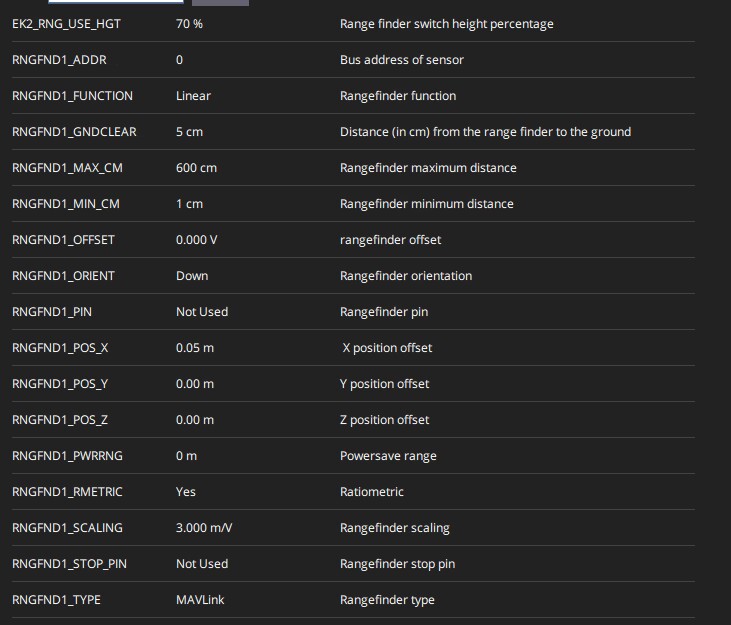
However, the optical flow and the range finder have been successfully connected to the autopilot through mavlink. I could disarm in Flowhold mode and the quadrotor can hover stably (but the dynmic performance is not satisfactory, so I wanted to use Loiter mode.). The parameters related to EK2, optical flow and rangefinder are listed as follows:
I found in some videos that the quad can disarm in Loiter mode without gps, just set EK2_GPS_TYPE=No GPS and use optical flow and rangefinder is enought , however it does not works in my case.