I have a new mRo PixRacer with the ESP8266 wifi board. The PixRacer is loaded with the lates Plane firmware, and the ESP8266 has the latest. I can connect to the PixRacer wifi with my laptop, and can read it using the getdata webpage. However, when I try to connect to the PixRacer using Mission Planner it fails to connect.
I get a Listen box that shows the Port: 14550. When I click OK, the Connection Failed box comes up, and the details page says “Only one usage of each socket address is normally permitted”. I’m not a network guru, so this doesn’t mean anything to me.
Can someone tell me what this means, and what I need to do to set up the wifi connection?
Did you first connect the laptop’s Wifi radio to the Esp8266? I don’t know how Mro supplies them but the typical SSID is ardupilot and password is the same. After that MP typically auto connects.
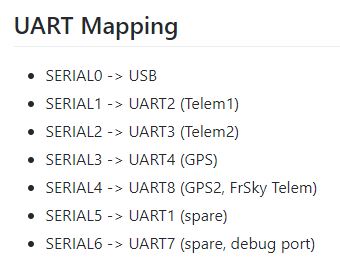
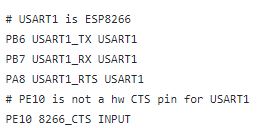
Yes, the laptop wifi will connect to the ESP8266. My guess is that MP, or the PixRacer port configuration is not correct. It’s not clear at all which port the PixRacer is using for the 8266 card. Haven’t had any luck getting that information from either mRo or any of the online documentation, including the Ardupilot website.
I have not tried QGC, because I need to use MP for certain features.
Yeah, that’s the problem I’ve been having with Ardupilot all along. It requires operators who don’t have a background in software code to dig through files. That’s not very helpful to the uninitiated. This need to be more transparent to the flying hobbyists who aren’t code hackers.
I set up everything as specified. Still get a message that the connection failed.
When I attempt to connect over UDP, MP asks to verify the Local port and auto-populates it with 14550. Then I get a message that only one usage of a “socket address” is allowed. Again, not helpful to a non-coder.
Any idea what socket addresses are, and how I change these to read my wifi?
Forgetting for the moment you want to use MP will it connect with QGC? If it does what does it say on the Summary page in the WiFi Bridge area. Screenshot is good.
Ok. I was just digging around and found out that Windows security has firewalls for domain networks, private networks and public networks. I turned off the firewall, but thought is was for all of them. I chose the private network and the connection started working.
HOWEVER, it connects VERY slowly. Takes about a minute to a minute and a half to load the parameters. Then the latency is REALLY high. When I move the board, the PFD doesn’t move for about 5 seconds. Any idea why the latency is so high? Is this your experience?
No. After it auto connects it loads the parameters in <1sec. This is with MAVftp in the dev version of Arduplane but typically parameters would load fast with current stable version also. Latency to the HUD is low. A look at your parameter file might be interesting if you want to post it.
Nothing to see there. Maybe update the firmware on the ESP8266 radio if it’s not the version suggested for Ardupilot. I asked about QGC because I think Mro supplies the radios with a different version suitable for the PX4 flight stack. But I don’t know, maybe it should work.Mro should know. I just know that I have 3 Pixracers with those radios and other ESP8266 radios with other flight controllers and have never had a problem with them…
I have three MRO Pixracers bought in the last couple of years and did not have any trouble connecting out of the box. To double check it’s not a problem on your device install QGroundControl (for testing, because it offers versions for mobile devices) on a phone or tablet and try that.
Also, make sure that no other device is connected to the vehicle’s wifi when you try. The whining about the socket might be because multiple devices are trying to connect.
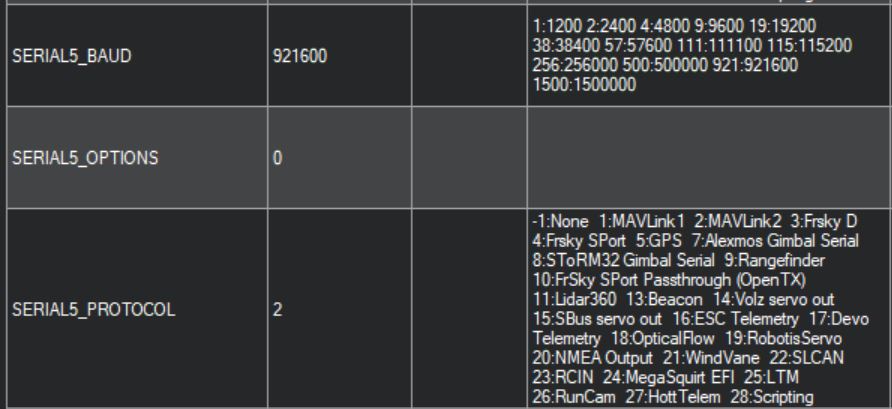
Having spent far too long debugging, I have finally found “SER_WIFI_BAUD” which is the parameter you need. I don’t know why this is ignored in ALL of the documentation out there. This is for a Pixracer R15, QGC, ESP8266 wifi card plugged into the “ESP8266/Wifi” vertical header block on the top.
So that’s a PX4 parameter and you are posting in the Ardupilot forum. No debugging required here, I have a few Pixracers with ESP8266 radios and those same radios on other Flight Controllers.