I have just started using QGroundControl for the first time as I have a PixFalcon I am setting up and was curious about loading up the PX4 stack.
I have using ArduPilot with APM Planner and Mission Planner for a while with good results.
The first flight was superb with default settings, rock solid and very responsive in Stab, AltHold And GPSHold, but ended very quickly with a battery failsafe.
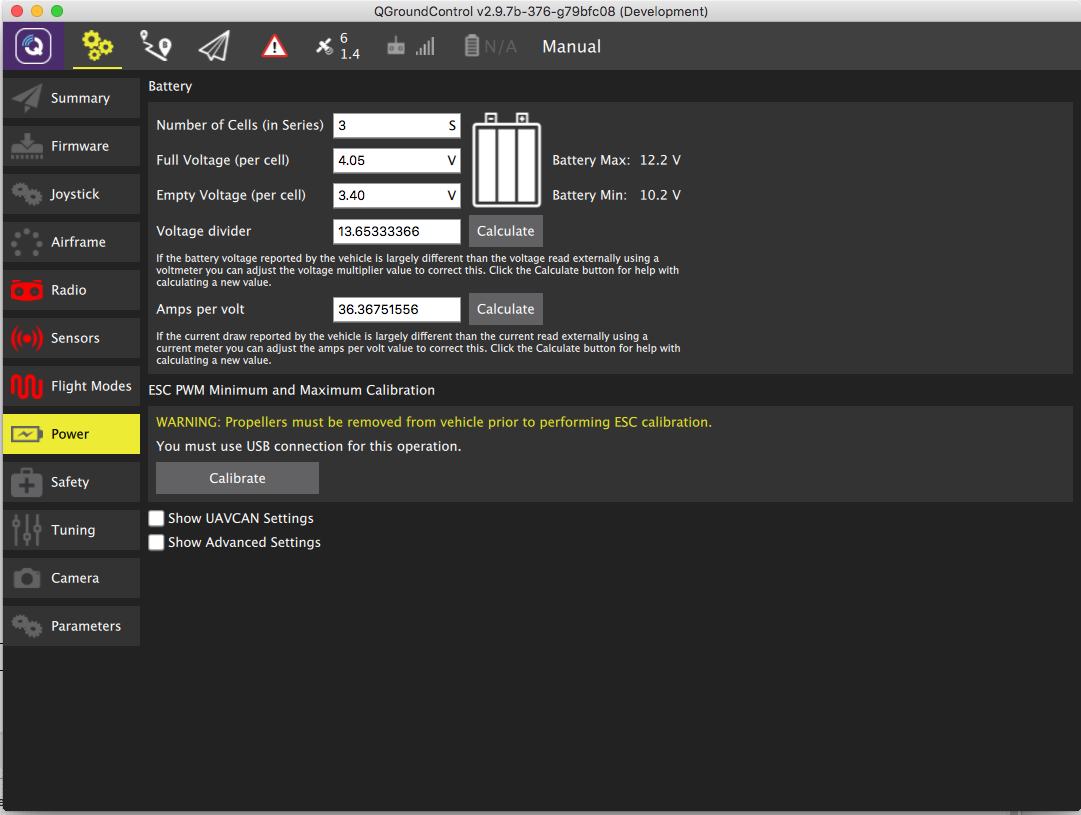
Checking the battery voltage revealed the PixFalcon battery sensor is reading too low a voltage.
So I spent the better part of an afternoon trying different values in the voltage scaling parameters to try and get a correct reading, but without success.
I then spent hours searching the net, this site and the PX4 site, for any info on battery calibration but could find none.
Is there any info, secrets, tips, tricks, to getting the correct battery voltage readings when using QGroundControl and the PX4 stack.
The Ardupilot stack seems much easier to tweet these readings to get them correct when using APMPlanner or Mission Planner, but of course these can’t be used with the PX4 stack.
Thanks @LuisVale I will try reposting my question there.
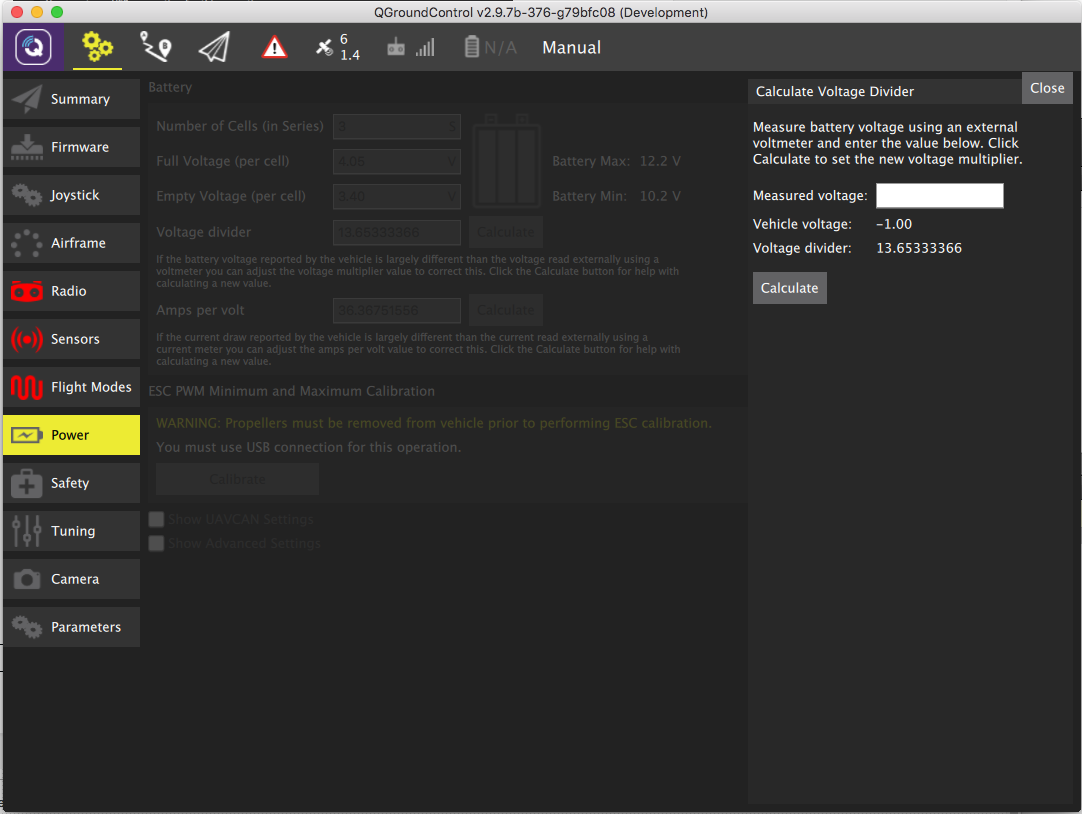
As a note, the MissionPlanner method of measuring voltage and putting it into the setup screen is easy to use a works well.
Could this or similar be implemented in QGroundControl?
FWIW, I am running ArduPlane 3.5.1 with Mission Planner on a PixFalcon, and have been able to calibrate voltage and current reasonably well, though I still find battery RTL’s more of a PITA than a life ring.
It seems to be a problem with the PX4 Stack.
I was hoping to check out the PX4 stack on this copter but if I can’t get the battery monitor working I might have to go back to the Ardupilot firmware.