Yep did this test before, I do it again to prove that when I remove olliw subdirectory
I confirm that the file is exactly like this one:
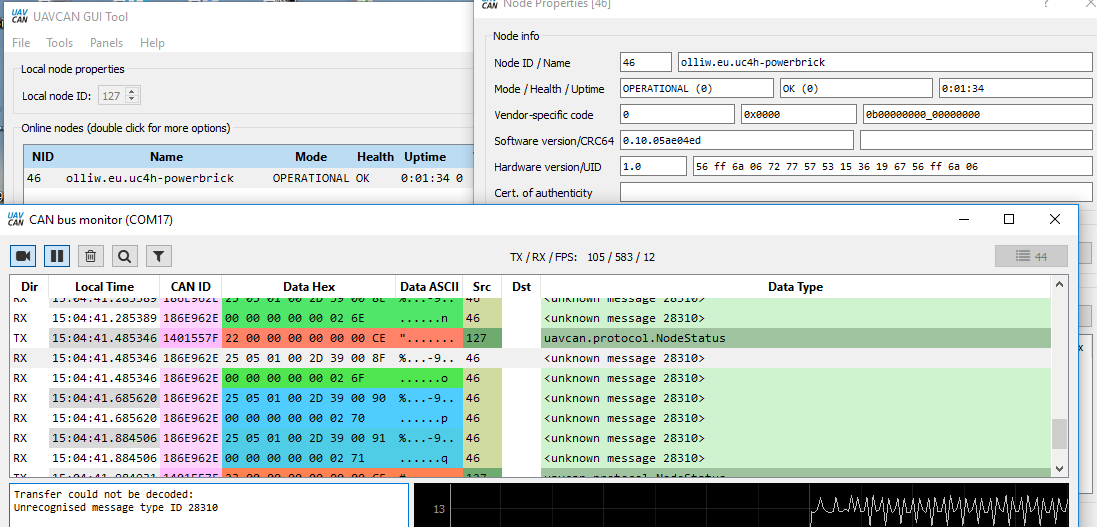
Its like there is some data missing in the PayLoad , does the Node need a special configuration ?
Yep did this test before, I do it again to prove that when I remove olliw subdirectory
I confirm that the file is exactly like this one:
Its like there is some data missing in the PayLoad , does the Node need a special configuration ?
have you put the dsdl in the correct subfolder?
the sequence of folders must be identical to that in the repo
EDIT: just checked your gui screenshot in the above again, and it seems you have placed it into the power.equipment subfolder, which would be incorrect
Well that was according to your instructions ?
They thus need to be made aware to the tool by copying the message definition files to a particular folder: Move the folder „olliw“ with the .uavcan dsdl definition files to the folder „C:\Program Files (x86)\UAVCAN\UAVCAN GUI Tool\uavcan\dsdl_files\uavcan\equipment\power“. Now, after a restart, the UAVCAN GUI tool should show the new messages in e.g. the bus monitor, and not display „unknown“.
oh sh…
this was so for the first version of the messages, but I have placed them in my “own” uavcan.olliw vendor specific section since quite a while, it seems I have updated the messages but have forgotten to correct the subfolder
I’m very sorry
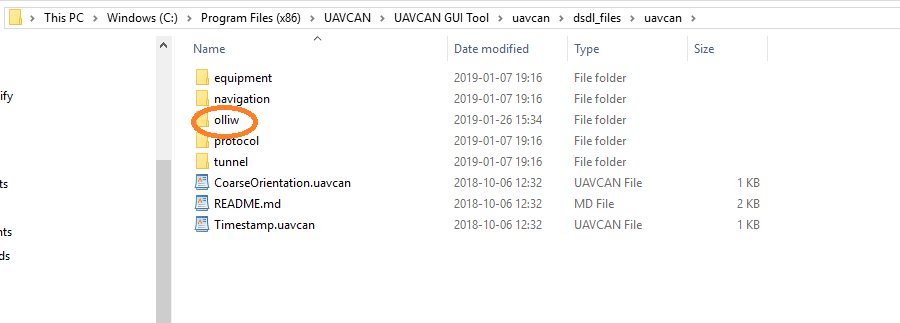
the sequence of folders should match the sequence in the dsdl name, e.g. uavcan.olliw.uc4h.GenericBatteryInfo => uavcan/olliw/uc4h/28310.GenericBatteryInfo.uavcan
No problem…
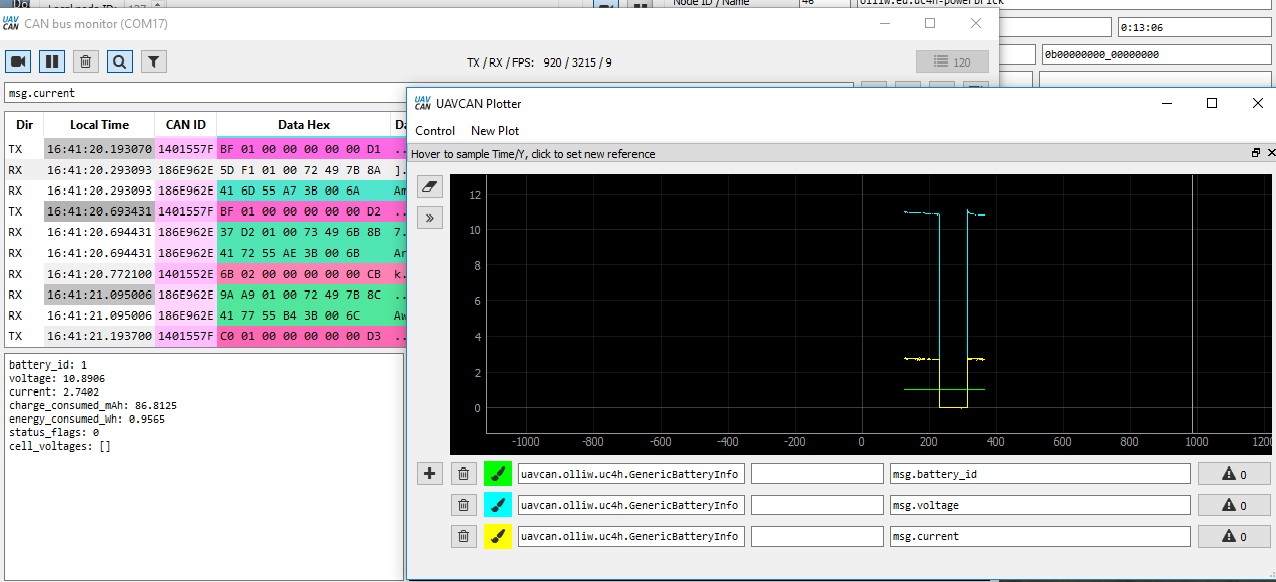
Right Place
Right Data == Showing a 3S connected to a 4 Ohms 50 Watt Dummy Load with a disconnect-reconnect sequence test
@olliw42 Thanks, and please update the wiki
the sequence of folders should match the sequence in the dsdl name, e.g. uavcan.olliw.uc4h.GenericBatteryInfo => uavcan/olliw/uc4h/28310.GenericBatteryInfo.uavcan
so, the olliw folder should go up two folders, to a subfolder of uavcan
Thanks
thx for your patience, I should have noticed this earlier from the screen shot
and please update the wiki
already done ![]()
btw, if you happen to have a FrSky lipo multi cell voltage sensor, you also could use the cell voltage feature: For your v1.1 powerbrick, you would connect it to Gnd and Tx on the UART pin header, and would grab power from a C5V pin, e.g. on the CAN port pin header
Hello!I am very glad to see such an excellent UAVCAN module. I am a fixed wing player. Do you have any instructions and cases to use on fixed wings?