Digging into my recent EKF3 lane change event, I’ve been reading the docs about when this capability was first available.
As I understand it, EKF3 tracks errors on sensors (GPS, barometer, magnetometer, etc.) and when a threshold is exceeded for these errors, it switches lanes (IMU) to one with fewer errors.
There are parameters that control this - although I could find no advice or direction on how to set them. So mine are at the default.
It seems to me that for diagnostic or precautionary measures, its important to plot these EKF3 errors by sensor type. I’ve look through the log parameters - and I’m unable to tell if any of the available parameters track the EKF3 errors that trigger lane changes.
Start here EKF Filter Overview
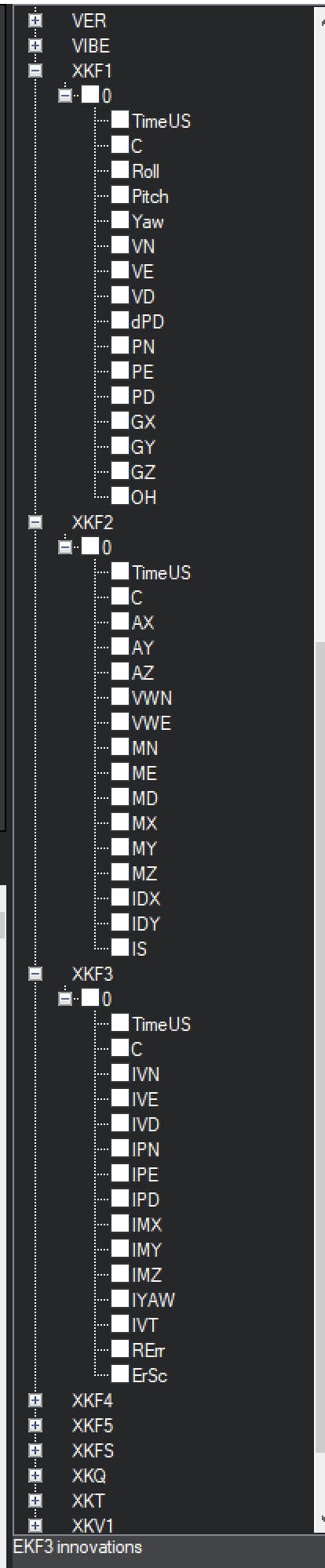
For log analysis page down to “Interpreting Log Data”. In the log there are the equivalent parameters:
EKF1=XKF1, EKF2=XKF2… It’s helpful to mouse over the specific parameter and see the description in the Text Box on lower right.
The doc in your link describes the values for EKF2.
It’s possible to find many of the messages under the XKFx log parameters - but not all.
And lane changing was introduced in EKF3 - so the error it considers for lane changing may or may not be included in the messages described for EKF2 - I don’t know.
It describes E(X)KF1 2,3, and 4. What they are and where they are in the log. You asked how the EKF errors can be plotted. This is where the parameters can be found in the log. It’s very useful. EKF3 (Innovations) can be very helpful when diagnosing a problem.
No, that’s why I said EKFx=XKFx in the log. Perhaps the docs need updating. I do know that if you want to evaluate the EKF Data and you are running current Stable, beta or dev this is where you will find it.
Some of the parameters that control lane switching are mentioned - but there’s nothing to advise on changing their values from the defaults.
And still no mention of “XKFn” log messages.
Lane switching involves exceeding a defined error threshold. EK3_ERR_THRESH. I’m trying to find the value of what is being compared to EK3_ERR_THRESH over the course of the flight - so I can examine if I’m operating at risk of a lane switch.
Yes sir - very familiar - All I need to know is what their values are - in particular, the errors that are used to compare to the thresholds for lane switching.