I know it’s me.
But I don’t get it.
I am trying to build my first VTOL and keep banging my head against a number of problems.
The big one right now is I can’t get rudder or elevator servo movement.
If I arm the bird on the bench in manual flight mode. I can spin up the pull motor. But rudder and elevator are silent. I have no way of knowing if it is actually capable of controlling them.
I have not tried aileron yet.
I can run them using a servo tester and confirm continuity with my multi meter…but no movement.
Also if I connect the motor signal to the servo they still don’t move. I suspect that has something to do with BLheli output or something.
Anyway I am lost. I keep reading but I must be missing something.
Hey Rolf
I am using the QioTekZealotF427
I have had this thing working before on a test rig. I then took it apart and put it into the VTOL with no joy after that. I confess I also flashed the newest firmware.
The documentation states I should have the Channels 1-4 used for the Aileron, Elevator, Motor and rudder. But this doesn’t work.
When I check my notes from the test rig. I have Channels 1-4 setup as above with the copter motors on 5-8 again as the documentation states.
I don’t know what documentation you are referring to. I haven’t found any documentation on the timer groups of the F427 right now. But I would just connect the quad motors to outputs 9,10,11 and 12.
Basically you can set the output functions as you want. But it is important that you know which outputs the flight controller has at the same timer groups.
Example:
If you have 14 servos, you can assign the functions to the servo outputs as you like. But as soon as a motor output is defined, it and its whole group will be controlled with 490 HZ PWM repetition frequency. Good for an ESC, bad for analog servos. Likewise you can switch Dshot only to a whole group of servo outputs.
Therefore, with VTOL it is important to know which servo outputs the respective flight controller groups together.
Well this is what I was thinking. That I in someway have defined channels 1-4 as a motor group.
Yet I find nothing that defines that.
There use to be some BRD PWM like setting but I don’t see that any long.
As for the documentation, I am referring to the Arudplane documentation. It states 1-4 for normal plane and this for the copter part. I know that will change slightly depending on the type of outputs that are available.
Output 5: Motor 1 - Front right motor, counter-clockwise
Output 6: Motor 2 - Rear left motor, counter-clockwise
I think you do the motor assignments after the standard flaps layout servos. don’t forget to assign the rear motor pusher throttle 7 as well…Try this combo. A,E,T.R then add your quad motors.
Thanks to Dave @dkemxr it is clear and as @rickyg32 suspects, it has something to do with BLHELI:
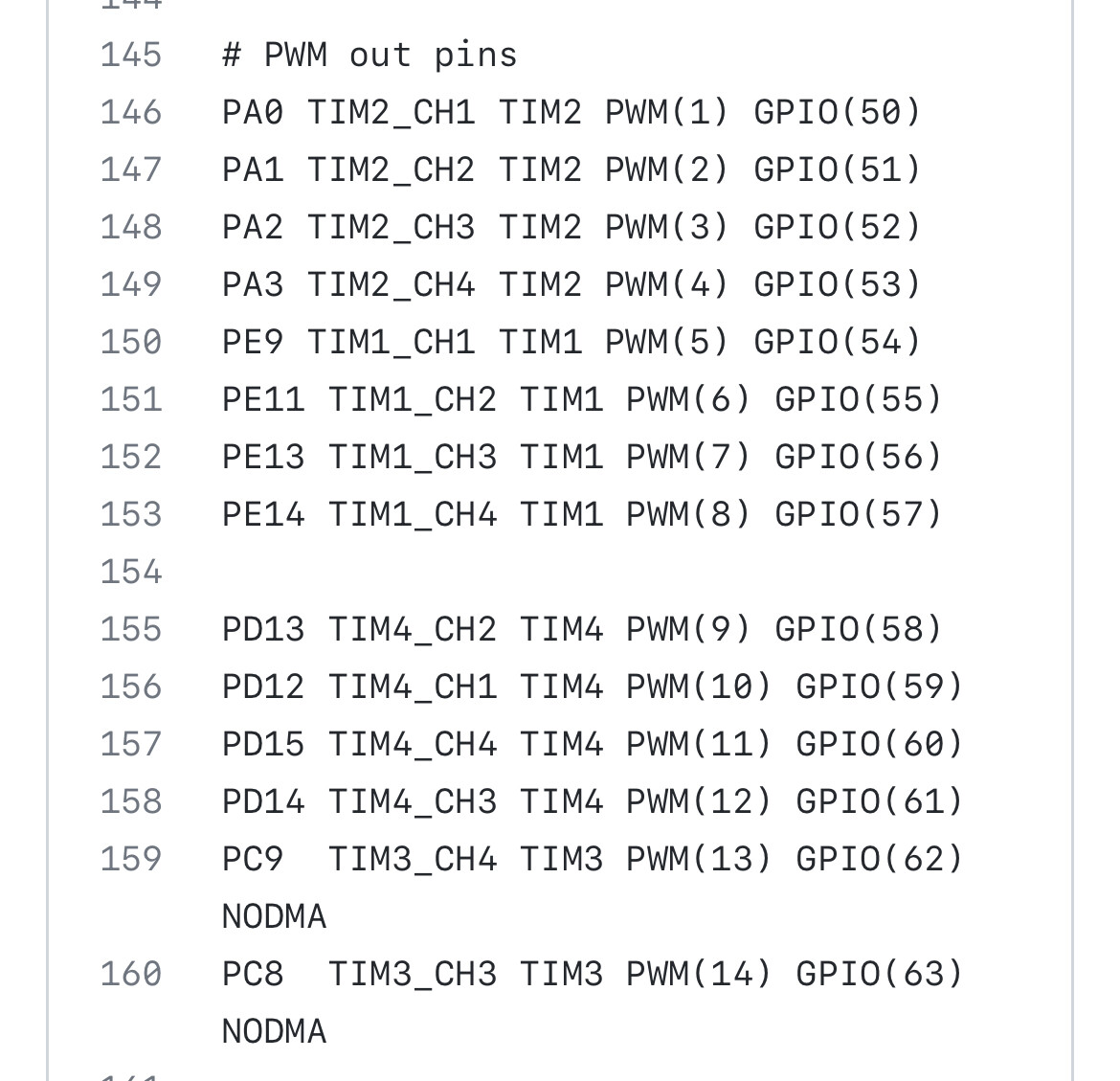
Servos 1-4 are assigned together to TIM2. On servo 3 the forward motor is controlled, however not by PWM, but by DSHOT, as set: SERVO_BLH_MASK,4 = Servo3,
SERVO_BLH_OTYPE,4 = DShot150 .
The quad motors are well connected, all on one timer group.
I would move the motor output for the tractor motor (ServoX_function 70) to e.g. Servo9 or switch to PWM. The ESCs of the forward motors are controlled with 50 Hz (in contrast to the quad motors, which have 490 Hz with PWM control) and therefore analog servos in the same group are no problem.
That was it Boyz.
I new I had something wrong. Your information provided the answer.
I moved the tractor motor to channel 9 as suggested by @rolf. Then set the config accordingly and now I have proper servo movement. I still have a ton to solve, the next being esc telemetry. But I think that’s an easier fix. I suspect I have the serial port setup wrong. I need to find which serial is UART1 and set the protocol and likely that will solve it.
More reading.
Thanks everyone. This is a really interesting project and I am learning a lot. I really appreciate the collective brain trust here.
Update: BLHELI passthru is working perfectly as is telemetry now.
Just need to wait for a few bits and then move on to the next bit of work.
Well after taking all your input guys I just wanted to say thanks again and show you the results of that input. I need to check the lift motors next but it’s progressing.
hahaha well I will but I need to first get the FC properly mounted.
I have a couple more connections to make then I can tuck it away and give that a try.
Well I have three of the 4 lift motors working. I do have continuity from the controller to the Number 3 esc so it’s something else going on. At this point I suspect a faulty ESC on motor 3 right now.
Also motor 1 knocks when it spins so I need to pull it and see if something is stuck in it.
Also I appear to have telemetry for ESC 5,6,7,8 which sounds right. But no main motor telemetry which I did have at one point so something is wrong there.
I also notice that when I do a motor test there is a strange noise coming from the servo for the elevator. They seem to move slightly.
No idea if this is normal or not.
So more work to do.
Update.
The thumping motor I pulled apart. Some sloppy epoxy in it, chipped it off the motor bell and no no thump.
The other motor’s ESC was replaced and all motors are now working as expected other then one turning the wrong way.
The other issue is I can’t get telemetry for the tractor motor. Any thoughts would be appreciated.