Last weekend I recalibrated my 1.2m/14.6Kg boat and took off for a 2km round trip. Although I had multiple problems regarding a laptop battery crapping out within minutes, shutting down all usb-ports, thus not knowing where my boat was and if it would ever come back. I noticed some weird behavior when looking at the camera footage after it returned safely. As soon as my boat entered the main canal, going from still water to strong head current, it started rolling like mad. (And pulling +8Amps for a trip that normally drains approx. 2-4Amps for the little time I did have telemetry, it was a STRONG current)
It was truly some long, terrifying moments, until I heard my Radiomaster say: ‘Telemetry Recovered’ at approx. 450meters. This gave me hope that it was on it’s way back. (I did have a full size recovery boat on stand-by so in the end it would be ok if it all went down hill)
If somebody can help me with the tuning of my boat, I would really appreciate that.
Edit* this is an overview of the P,I,D where the turnaround point is clearly shown. I don’t understand how I can determine what value needs to be lowered or raised?
It either has too much P gain or not enough D by the looks of it, you can see it overshooting and weaving before it hit the current. then due to the increased thrust giving the rudder more authority it’s started rolling and then when you have hit the FAST current the correction rate has synced up with the boats natural roll frequency causing the oscillations to build up.
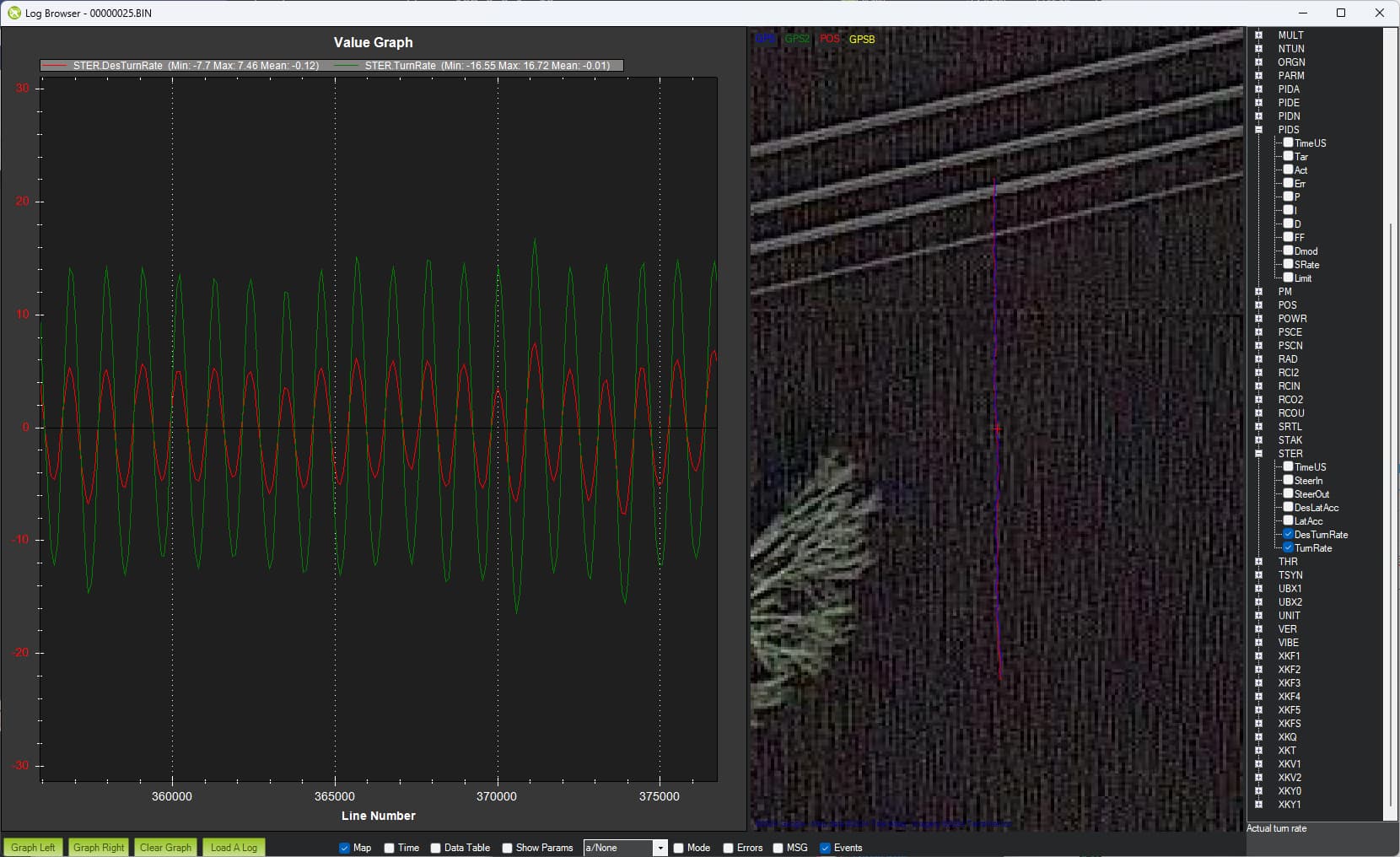
I think the ATC_STR_RAT_P term is likely too high. We can see during about half the mission that the actual turn rate (in green) is oscillating and is much higher than the desired turn rate (in red). So from this we know that some gains are too high.
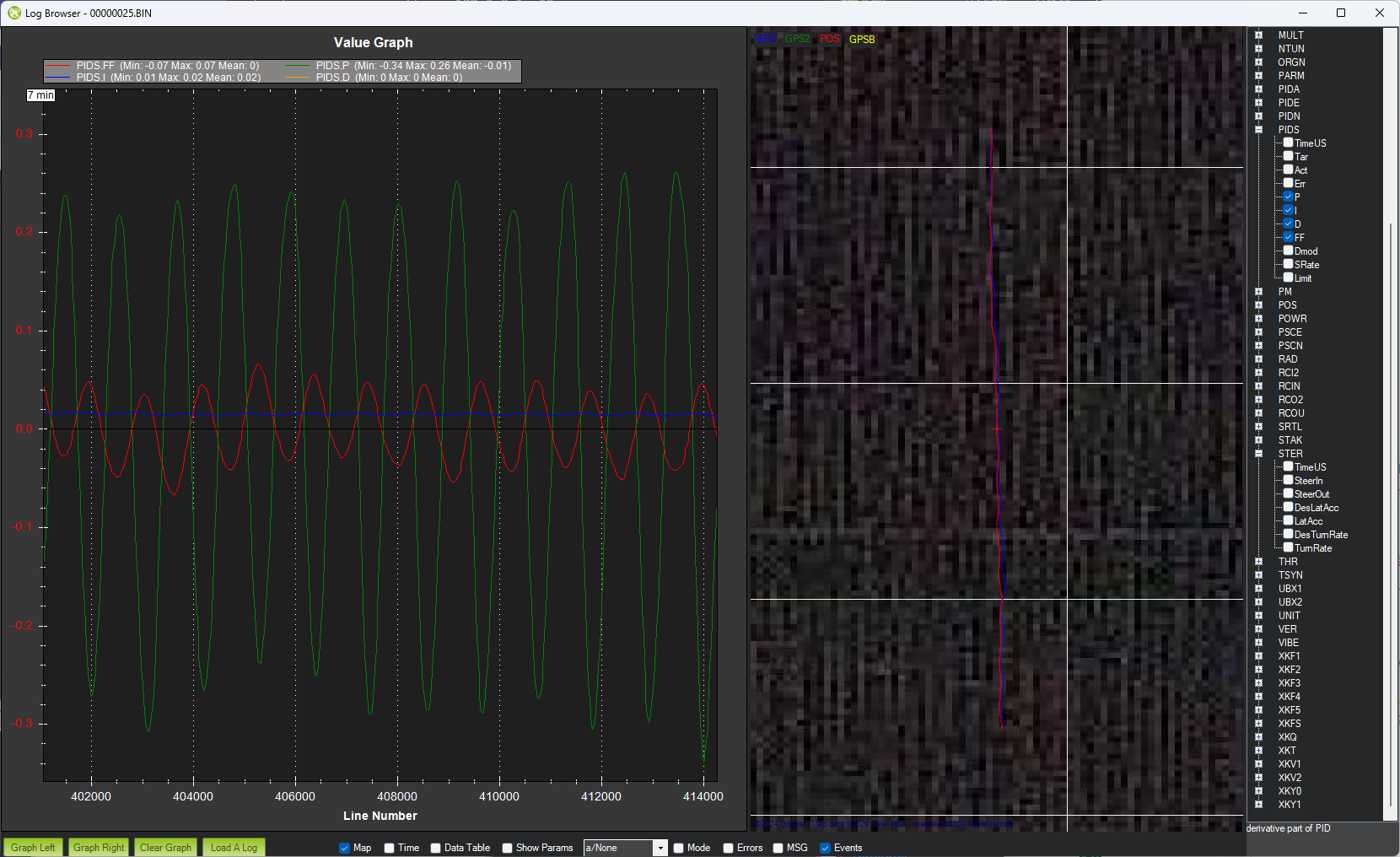
The ATC_STR_RAT_xx parameters are the most important. From looking at the balance of FF, P, I and D we can see that P (in green) is doing all the work but we would normally expect FF (in red) to be the largest
I wonder if you’ve tried to follow the turn rate controller tuning guide? As a rule of thumb P should only be about 20% of FF but it looks like P is actually about 3x FF.
So I suspect making ATC_STR_RAT_FF much higher and ATC_STR_RAT_P much lower will help.
By the way, ArduPilot has automatically oscillation suppression so if you set ATC_STR_RAT_SMAX to 1 it will automatically lower the gains in this situation. With proper tuning this shouldn’t be required though.
The first tune I did was terrible. Even in still water the boat rolled like crazy. After playing around with the settings I noticed some desired behavior… in still water. Not knowing what would happen if the boat would encounter strong head current, I send it on its way.
I take both of your suggestions by heart and hopefully I can post some positive results after the advise I got.
I also installed the quick tune luascript and go from there if it has some good results.