Hello guys,
I have built new Quadcopter with 20" props, using Cuav Nora autopilot and Neo3 gps. The drone can fly well in stabilize, Alt. hold and Loiter. The problem is when I switched to Autotune mode (from Alt.Hold), this command failed with message : Autotune failed, need manual tune… So I changed to Alt.Hold and then Loiter without any issue. I have followed all procedure according to the documentation, and did the “Initial Parameter” setup. Vibration is low (below 20, but Y vibration is about 20) and No clipping at all. Battery is 6S with KV300 motor and 20" propeller.
I have done some test in Stabilize, Alt. Hold, Loiter, and result is the drone can fly stable. I have checked that using default PID , all Roll, Pitch and Yaw response are good (please see the Chart in the log .). But I am very keen to do Autotune to improve the response. I don’t understand how to solve this problem and need advice from experts. Maybe @rmackay9 , @xfacta , @andyp1per can give me advice ?? Thank you very much. Copter FW is 4.1.5. Here is the log
https://drive.google.com/file/d/1vEgsY63Jr1LFFna55fhSaip_xhBd-pmE/view?usp=sharing
The vibrations aren’t bad, but there is room for improvement. It’s a horizontal vibration so I’d look at the motor mounts or propeller balance. Another option would be to look at your FC and the mounting. If you soft mount your FC, make sure that nothing is restricting the movement. If you hard mount your FC then make sure nothing is touching or hitting the FC in flight.
Maybe I missed it but I didn’t see anything in that log about autotune. No messages like the one you described and RC7 (your Autotune switch) is low for the duration of the log Do you have a log with an attempt at Autotune?.
Hi @Allister ,
Thank you for your response…
I did several test flight, and I really did the Autotune and really got the message that, Autotune failed because it failed to level and need manual tune… But may be I forgot which log that contains this error…
Another weird thing is about the barometer altitude show wrong altitude… Actually I did hover at about 3 - 4 meter, but in the log I found the barometer show altitude very low and even minus… (both barometer are consistent measuring similar pressure/altituide) How to callibrate the barometer??
The Neo3 Gps is excellent, as I got about 27 - 32 sattelites…
As you see the Z vibe is very low as I use special silicon damper at the motor, but yes the y (horizontal) vibe is about 20 (according to document, it is still ok). But I realize there is room to lower this Y vibe .
But my key Question is what is the root cause of my problem that directly cause the Autotune failing??
I never had this kind of problem with my other Copters.
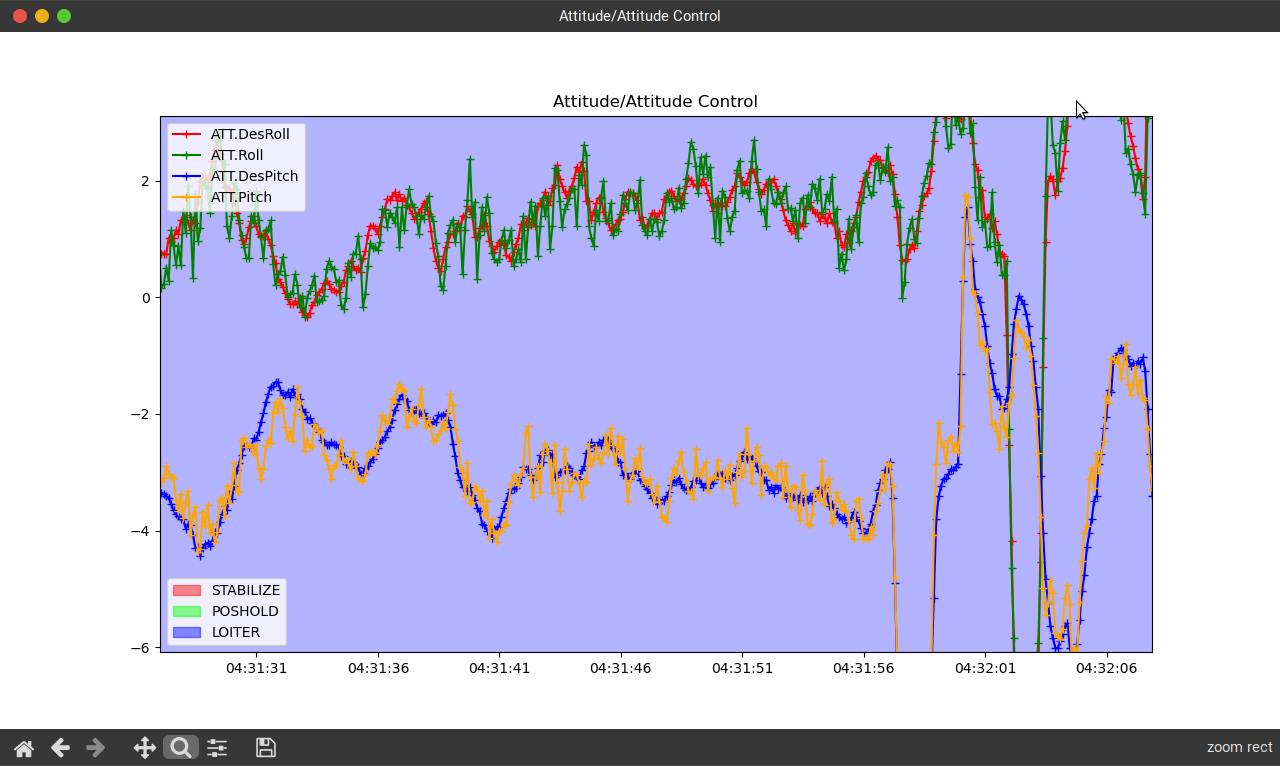
By the way, how do you think the PID setting?? I found the chart of Dest Roll vs Roll, also the Dest Pitch vs Pitch are good…What do you think??
Thank you…
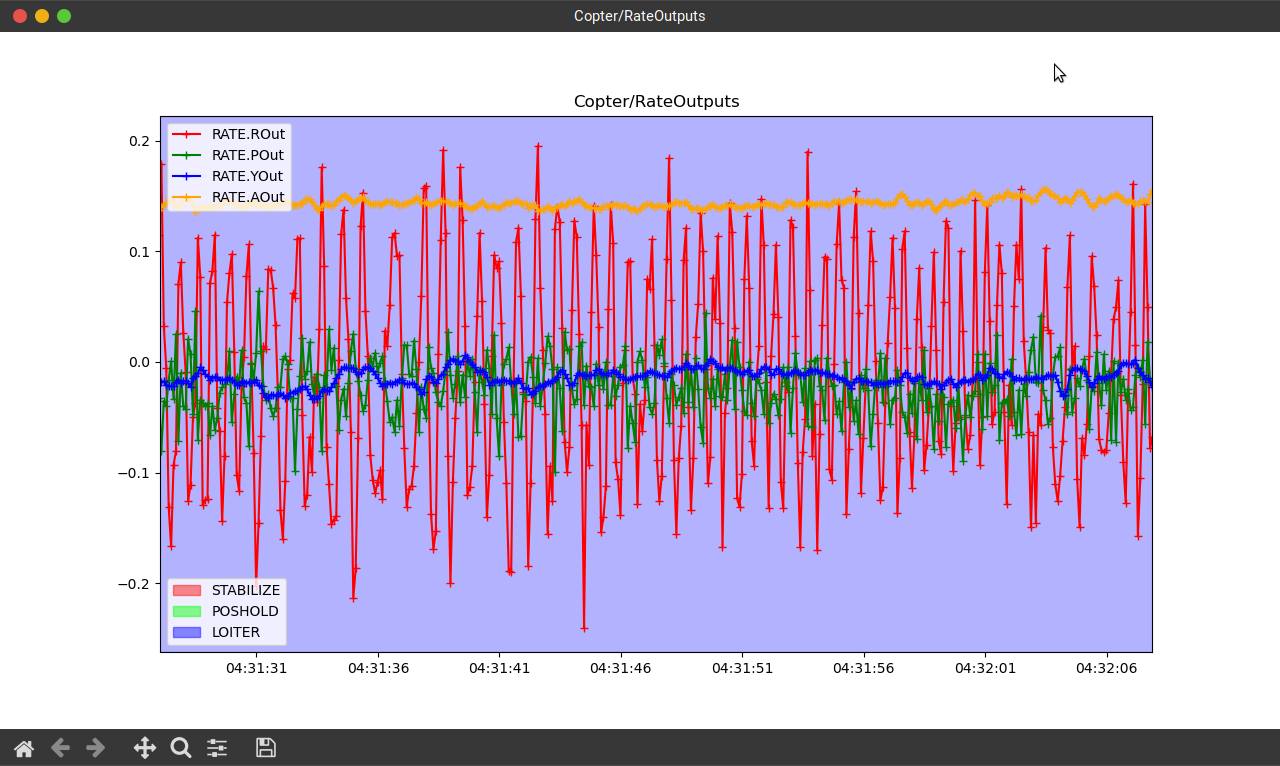
I don’t think they are good, there is a lot of oscillation. This can be seen in the Outputs and the Rate>ROut/POut also.
Try dropping these to .100 and see if this improves.
ATC_RAT_PIT_I,
ATC_RAT_PIT_P,
ATC_RAT_RLL_I,
ATC_RAT_RLL_P,
There have been cases posted on the forum where that has been detrimental.
Before you run Auto Tune you should configure the Dynamic Notch filter.
Hello @dkemxr Dave,
Thank you for your advice, I will check again these parameters…
BTW, how to see the oscillation output?? Could you please advice me how do you know that there is a lot of output oscillation …I just don’t know how to show the output chart . Tks.
However, regarding the silicon damper , I have done some testing before and after using it, and my conclusion is in my case, it reduce the Z vibration Drastically.
So the remaining vibe is Y (horizontal). But I think it is still below the tolerance limit (but I will reduce it).
However, Any thought why Autotune is failed…??.
Anyway your advice is highly appreciated…
Thank you.
Try dropping the Rate P&I values as suggested. And don’t run Auto Tune until you have successfully configured the Dynamic Notch Filter. Although with compliance in the motor mounts it will be interesting to see what the FFT looks like.