So you suggest to solder the 4 motors and then try to connect to am32 config?
Flash Betaflight to that FC, then configure it as bdshot and check on the motors page if E (Error) is 0% for each motor. Means all ESC connections work and a native BF should be able to connect to ESC-Configurator without issues.
I am curious how did you conclude you need to reverse this motor SERVO_BLH_RVMASK,1024, without connecting a physical motor, interesting.
I had a Tmotor ESC F55A Pro III. One motor was rotating in the wrong direction, therefore i had to reverse it, which I could have done it through the esc configurator BLHeli32 Suite but i think at that moment it was easier for me to do it in that way. Then that esc got damaged because of the banana connectors were touching each other so I had to change the esc and when I posted this issue I had the same params which I thought it should work since I could fly AND connect to BLHeli32 Suit with no issues.
Never worked with BetaFlight but Ill give it a try. This might take me some time.
Pixhawk 6X unlikely to support betaflight.
I know. I have a Tmotor F7 flight controller laying around
No one have an explanation about this tho?
If it’s that FC, there is support.
Install BF Configurator
flash the F7. You already do most of the configuration while choosing the firmware.
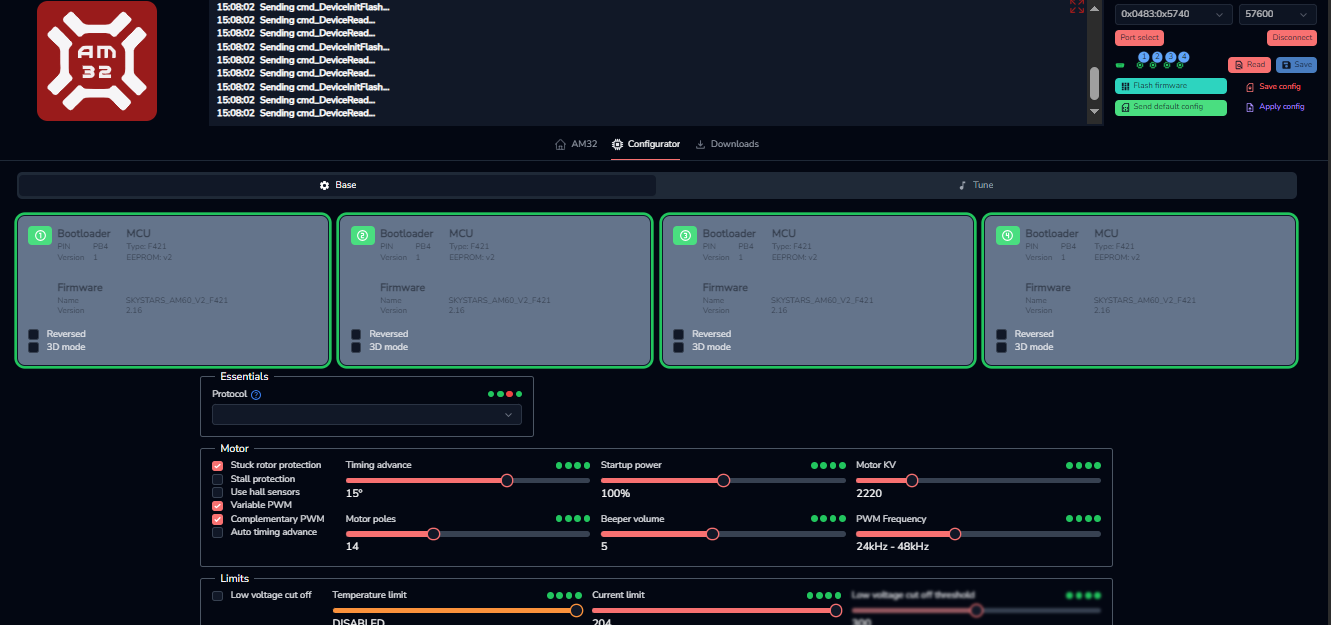
Ok guys so i can confirm that the issue is from the param config in arducopter or the firmware version itself. I just used the Tmotor F7 flight controller as a board to connect to the esc and as shown in the image below all esc can pass through.
Thanks to @menschel now i know that the issue is centered around arducopter. However, i dont know how to move forward. The only thing im thinking about is to solder the motors and try to connect again to check if they pass through while using pixhawk and arducopter; but if this does not work then i will use the F7 controller board as my configurator to change the esc’s param as i want…
Previously you used 57600 baud rate, now you used 115200. Try to use 57600 baud rate with T-Motor F7 flight controller to see if that’s the root issue.

If the issue is passthrough then this is very timing sensitive and will not work on all boards. The fact that one ESC works but others don’t is quite common. Passthrough on AM32 has been particularly problematic.
1 Like
I just did and still the esc can pass with Tmotor F7 flight controller
i am still facing same issues when i connect to pixhawk 6x after soldering the motors on the esc.
While you’re at it, reverse motors 2 and 3. I’m deeply disappointed that a factory flashed 4in1 ESC is not setup correctly. 2.16 is current firmware.
Concerning the Pixhawk 6X with Coper 4.5.7, you only know that the device HW+SW does not work correctly. You don’t know yet if it’s HW or SW.
What do you mean by this? What isn’t set up correctly?
I expect a 4in1 ESC to have motor direction setup correctly by factory.
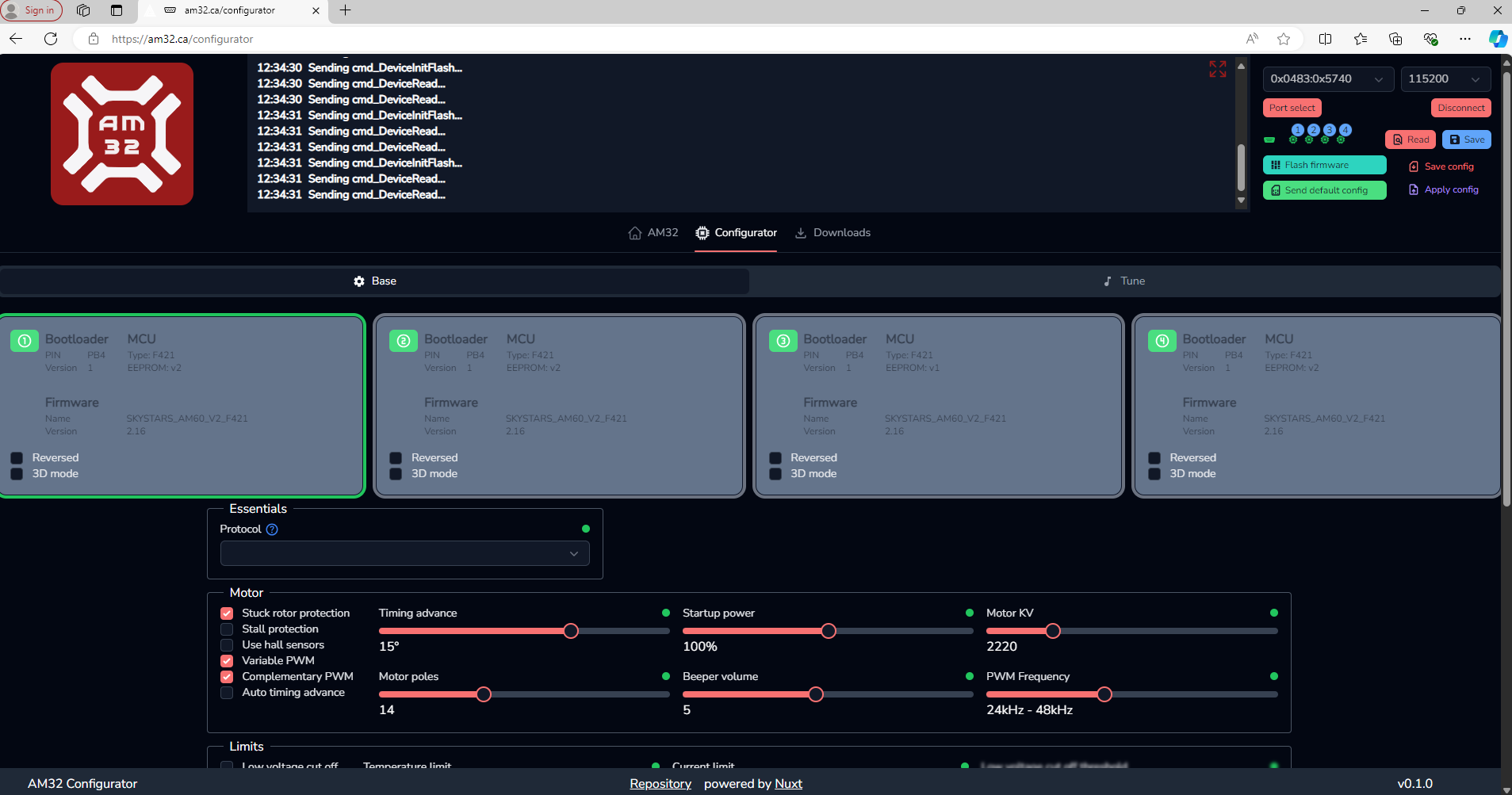
That pic above shows all are just flashed with AM32 and left at default configuration.
Motors 2 and 3 (Betaflight Numbering Scheme) are not reversed.
You seem to have some strange expectations regarding motor reversal. First it was an assertion that RVMASK is unsafe (it’s not!). And now you expect an ESC manufacturer to guess how your motors are wired (there is no guarantee of a certain rotation direction when connecting 3-wire brushless motors).
I’ve never seen any AM32 or BlHeli 4in1 ESC factory configured with any motors reversed. The expectation is default settings (as shown). It’s on you to correct motor direction at installation time. Often, this is accomplished by simply flip-flopping two wires rather than doing it in software, which is why an expectation of reversed motor settings from the factory is rather pointless.
1 Like
What is the temporarily workaround to configure a AM 32 ESC with Ardupilot? GUI configuration software or web browser that supports web serial direct connection, USB convert to serial? Is it possible to do a direct connection?
Another question is on SERVO_BLH_OTYPE, I have been using BL_Heli 32 digital ESC many times and this post alerted me to check on my past SERVO_BLH_OTYPE value, always zero. It was not mention anywhere in the document except the complete parameter list. When should user need to change, on what situation.
Well, I believe @tridge spent some time fixing AM32 to make this work, so he will probably want to know if it isn’t. I would start with the AM32 GUI.
SERVO_BLH_OTYPE is only required for non-standard setups. For standard setups MOT_PWM_TYPE should be sufficient.
1 Like
Yuri, as a SW developer, I have a professional attitude towards this dispute.
I did not mean to defile the mechanism of RVMASK. I realize it’s use with non-configurable ESCs.
My assertion is based on the following facts.
The user did reverse 1 Motor on a QUAD, not 2.
The user was also knowledgeable in use of BL-HELI32 Configurator to reverse ESCs.
4in1 ESCs are BF numbered and a BF Quad has a default rotation for a motor. The BF ecosystem is dominant enought that even the JST Cables from FC to 4in1-ESC are standardized. Thus my expectations.