Have you install a hardware safety switch? Pass through setup and only support on “AUX” or “FMU” outputs with DShot capability, not the “MAIN”.
Honestly,
please follow the steps according to documentation. There is no magic about it.
Dave pointed you in the right direction.
Your FC needs to know what ESC is to be expected and on which channels, otherwise nothing will work. I’m sure your T-Motor ESC with AM32 is also fine, so there was no need to exchange it.
https://ardupilot.org/copter/docs/common-blheli32-passthru.html
There is more then just one issue in your parameter file.
Assuming you’re on the FMU PWM outputs 1-4.
https://ardupilot.org/copter/docs/common-holybro-pixhawk6X.html
Try…
SERVO_BLH_AUTO,1
SERVO_BLH_BDMASK,3840
SERVO_BLH_MASK,3840
SERVO_BLH_OTYPE,6
SERVO_BLH_RVMASK,0
SERVO_DSHOT_ESC,3
In particular dangerous is that you tried to reverse ESCs via RVMASK.
The clean way to do it, is to change the ESCs config.
EDIT:
Found yet another issue. Are you trying to switch Motor Channels by hand?
To me that looks like a BETAFLIGHT X.
So FRAME_TYPE should be 12 and the SERVO Functions should be left alone!
SERVO9_FUNCTION,33
SERVO10_FUNCTION,34
SERVO11_FUNCTION,35
SERVO12_FUNCTION,36
There is no issue using RVMASK to reverse motors
I expect a new 4in1 ESC to be setup correctly from factory for a quad but maybe I’m wrong.
I have set the parameters you suggested. Although i thought that I had them but i think i changed by mistake while i was messing around. I tried to connect after setting up the parameters, including deactivating the safety switch, yet I have the same issue. I will appreciate if you have any suggestions @dkemxr
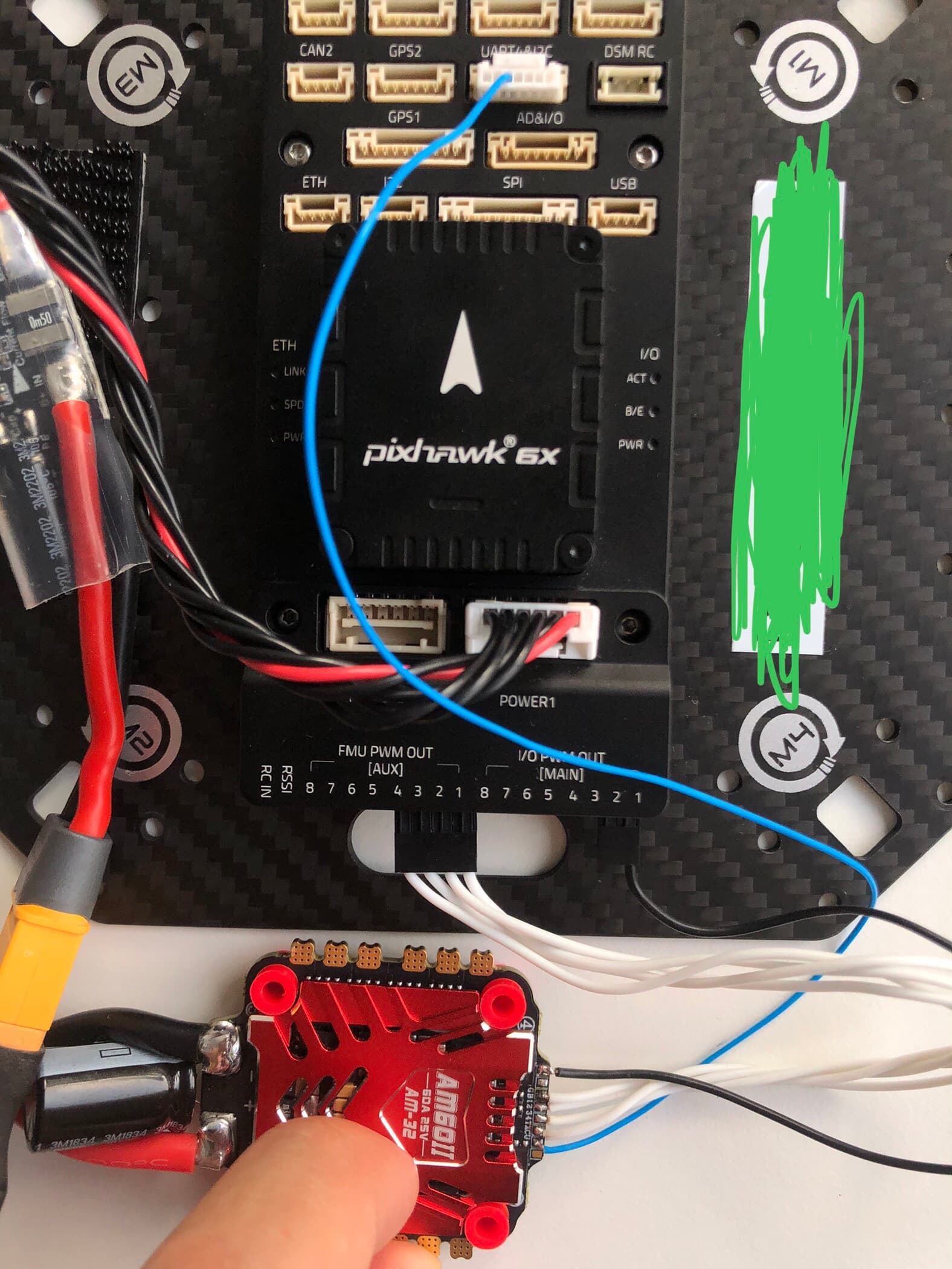
I also added my hardware setup and how everything is connected. The new params file is updated.

I am not sure why changing the frame type. I am using arducopter and not Betaflight. I also have pixhawk 6x which I mentioned previously.
After connecting in Mission Planner what does the RCOut message show in the messages screen for output protocols.
Is it possible to get the ESC AM_32 firmware version via online or GUI tool?
May I know if you are using a wired USB cable connection or a wireless Sik Radio connection?
Before that, change SERVO_BLH_OTYPE and SERVO_DSHOT_ESC and try, if still same then try shift.
For Cubepilot, yes DShot ports are 9 onwards on the right, can you try shifting it to servo 1,2,3,4 to see any different
On second thought, it looks correct.
SERVO_BLH_OTYPE,0 #still zero, not DShot600/DShot1200, mine with Hobbywing also 0
SERVO_DSHOT_ESC,1 #still BLHeli32/Kiss, AM32, officially in 4.7 dev doc
SERVO1_FUNCTION, 33,34,35,36 M#
But you have not hooked up the motor yet. So, what visual output do you expect to see or observe if it is not okay?
It boils down to simplification and error prevention.
You have a 4in1 ESC that is numbered by Betaflight Scheme.
Using FRAME_TYPE=12 and leaving the SERVO9 to 12 in ascending sequence MOTOR1-4 prevents confusion.
FRAME_TYPE swaps channels by configuration.
From what I see the param file is still wrong.
...
SERVO_BLH_AUTO,1
SERVO_BLH_BDMASK,0 <-- must include motor channels for telemetry
...
SERVO_BLH_MASK,0 <-- must include motor channels
SERVO_BLH_OTYPE,0 <-- must be dshot, this one is PWM!
SERVO_BLH_POLES,14
...
SERVO_BLH_RVMASK,1024 <-- again one motor swapped
...
SERVO_DSHOT_ESC,1 <-- must be 3 to be able to get EDT
...
It shows this: RCOut: PWM:1-8 DS600:9-12 PWM:13-16
I have tried your suggestion and it didnt work as well… Feel free to double check the param file named after you.
25.11.2024 09:50:26 : Frame: QUAD/BF_X
25.11.2024 09:50:26 : IMU2: fast, high-resolution sampling enabled 3.2k
25.11.2024 09:50:26 : IMU1: fast, high-resolution sampling enabled 3.2k
25.11.2024 09:50:26 : IMU0: fast, high-resolution sampling enabled 3.2k
25.11.2024 09:50:26 : RCOut: PWM:1-8 DS600:9-12 PWM:13-16
25.11.2024 09:50:26 : IOMCU: 410 2003 411FC231
25.11.2024 09:50:26 : Pixhawk6X-bdshot 0044001B 3532510C 30373630
25.11.2024 09:50:26 : ChibiOS: 6a85082c
25.11.2024 09:50:26 : ArduCopter V4.5.7 (2a3dc4b7)
25.11.2024 09:50:24 : EKF3 IMU1 MAG0 initial yaw alignment complete
25.11.2024 09:50:24 : EKF3 IMU0 MAG0 initial yaw alignment complete
25.11.2024 09:50:24 : EKF3 IMU1 tilt alignment complete
25.11.2024 09:50:24 : EKF3 IMU0 tilt alignment complete
I am connecting via USB. I power the whole thing through the battery then connect the pixhawk to a usb.
It should be seen in my previous post
I think everyone here is trusting the software too much that it should work with the documented config. I can understand that because previously it already worked for me. But can anyone have a reasonable explanation if the param configuration is wrong then why ESC#3 can still pass but the others can not?
I have just measured through multi-meter the signal output from pixhawk from AUX. I could read on port number 3 a voltage of 3.2V but the others (1,2, and 4) was ~0.4V. So maybe this can conclude that the config in arducopter is still wrong?
That is still missing for correct operation.
After that I would check for an electrical issue.
The methodical approach would be to swap pins on the DuPont Connector and see if the ESC that is found moves along with it.
Can you swap for the T-Motor ESC and check if that one works?
IIRC you did mention you crashed and burned an ESC before.
Do you have another FC to check if that one finds all ESCs?
Probably you reverse it in SERVO_BLH_RVMASK,1024
Try set it to zero and measure again to confirm.
I think you haven’t tell us yet.
I did change them after I replied on your post but still the same.
I also swapped to 5,6,7,8 AUX output but when i try to connect no ESC is found. Also, i swapped to MAIN but I got the same result. The only way i managed to find at least one ESC is when I connect ti 1,2,3,4 AUX.
Unfortunately, I have returned the T-MOTOR ESC back. I dont have another pixhawk but I have a T-motor F7 flight controller which might need another configuration for it to work with this ESC. But might be worth trying to know that the esc is functional at least. Would you assume that also something went wrong with the pixhawk after the crash, despite that I can still connect to it?
EDIT: I just find out that there’s no firmware for Tmotor F7 bshot.
I did not yet solder/connect any motor to the esc. Is this required to check ESC connection with the pixhawk using AM32 configurator?
If I remember, BL_Heli 32, yes to establish a connection between ESC and motors, because digital ESC no calibration needed, it may require establishment to report back to FC.
Yeah but now im trying with AM32
They are similar.