using mission planner ver.1.3.74
using pixhawk 4 quadcopter FirmWare ver. 4.0.7
yes you can. Update to the latest Mission Planner, and if it still does not work update to the stable version ArduCopter 4.1.5
I received a project.
I have to solve this problem(project) with mission planner ver.1.3.74 and pixhawk 4 quadcopter FirmWare ver. 4.0.7
If you are talking about the Mission Command “Condition Yaw” then no. If what you are showing in that illustration is a continuous yaw change between waypoints it won’t do that. It points to an absolute heading or a relative heading. You could potentially play around with a parameter that controls yaw rate but this is a poor solution. Perhaps give Guided Mode commands.
And whoever gave you that project suggest they change a fixed version of Mission planner and Ardupilot to Current Stable of each. It makes no sense to to use old versions with less features.
It’s a moving route during automatic flight, is there a way to adjust it with parameters?
No. You could try to use Region of Interest Do_set_roi commands to point the yaw heading to a fixed point as it flys the mission. Or issue Guided mode commands or possibly with scripting. But I don’t understand what you are trying to accomplish.
I think Lua scripting might also be a way to accomplish the intent, but I agree with @dkemxr - the intent is somewhat unclear.
Does it need to turn a specific number of degrees across a specific distance? Or do you just want to pan a camera continuously during the mission by yawing?
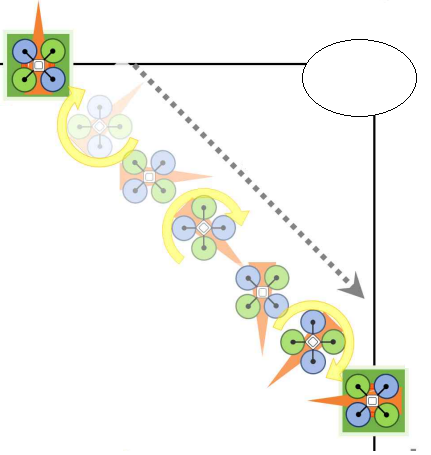
I need a way to turn the yaw slowly like as shown in the picture.
From specific start and end headings?
A specific number of degrees?
Only between certain waypoints?
At a specific rate?
Please be as specific as possible, or I’m afraid we can’t help very well.
Assuming that the diagonal distance from the top to the right is 6 meters, rotate about 45 degrees per meter, but move smoothly.
and only between certain waypoint
i’m also interested in this topic.
I’m facing the problem to rotate the yaw slowly duing the movement between two waypoint.
is that possible?
That’s not necessarily the same problem. If you just want it slower, or faster, there is a parameters for that. ATC_SLEW_YAW. Default is 6000 cdeg/s.
No. conditon_yaw and do_set_roi are the only commands that control yaw as mentioned. You will need to issue Guided commands.
This is a very easy problem to solve, assuming that it’s ok to clamp ATC_SLEW_YAW to the desired yaw rate for the CONDITION_YAW command. I don’t think Lua scripting will add much value since auto missions already support relative yaw commands (and Lua attitude commands are not yet supported in the Copter branch).
Here is a screenshot of a mission that I successfully tested via SITL:
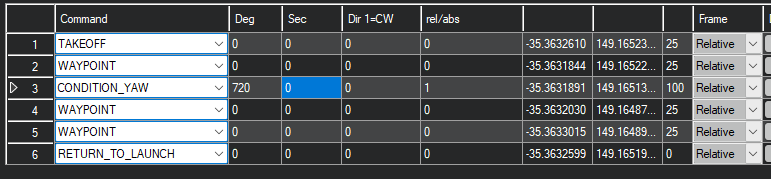
Note that WP 3 is set to rotate 720° counterclockwise with a “1” value in the rel/abs field to indicate a relative change in yaw. The CONDITION_YAW command commences immediately after reaching WP2. The Sec field is not currently supported, hence the need to set the slew rate mentioned above.
The distance between WPs 2 and 3 is covered before the 720° turn is complete, but that’s of no concern, since the command to proceed to WP4 cancels the CONDITION_YAW command, and the Copter ceases its CONDITION_YAW rotation to continue on course.
To recap, if you want a continuous 45°/s yaw rate between two waypoints:
- Set ATC_SLEW_YAW=4500
- Create a CONDITION_YAW command to yaw at least as far as is possible at the given rate in the distance between the desired waypoints (in other words, a high value for the
Degfield).
Hey,
Very interesting, I’ve also from my side experimented CONDITION_YAW but only with the simulator. I was using the following mission to make a 360° at very slow speed (18 deg/s and after 9 deg/s):
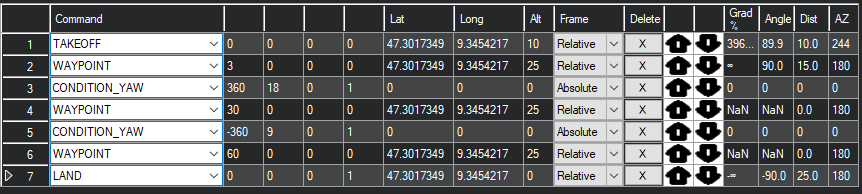
And according to the simulator the CW or CCW was not working but instead having + or - 360 works.
So that works with the simulator but you confirm it won’t work in real life…
Best regards,
Ced
Hello. I would like to ask about condition yaw’s absolute heading. Where does the absolute heading point? Does it point to a true north or only at the direction the moment it started to arm?
Absolute is relative to a compass heading. 0/360 is N
1 Like
So if i set the heading to 0, and have it set at absolute, it points to a true north then?
Yes, right. This is very easy to test in Mission Planners simulator as are many things. Run it there so you know what to expect.
1 Like