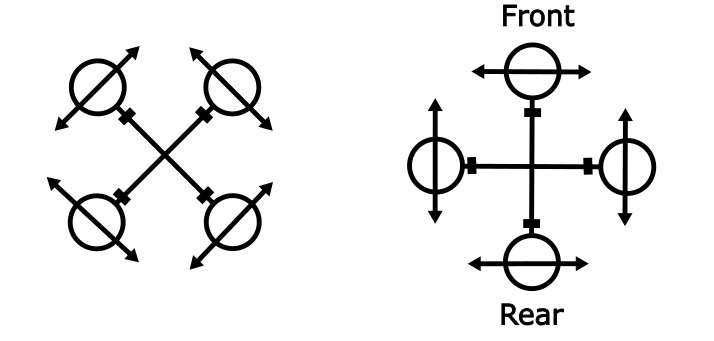
Hi everyone! I have a physical prototype (3D printed) for a drone using 4 electric ducted fans. Each EDF can tilt around the diagonal axis using a servo. So far I’ve been looking into using the quadplane tilt-rotor setup from arduplane, but I am not yet sure if it will support my configuration. Can I use quadplane tilt-rotor to control this drone or does it require custom coding? Also, can I simulate this within mission planner with using the quadplane model?
Any guidance/tips will be greatly appreciated and very helpful, thank you!! I want to make this thing fly.![]()