PX4:
http://brettbeauregard.com/blog/2011/04/improving-the-beginner’s-pid-derivative-kick/
Maybe you meant to post this on the PX4 website.
ArduPilot is completely separate firmware.
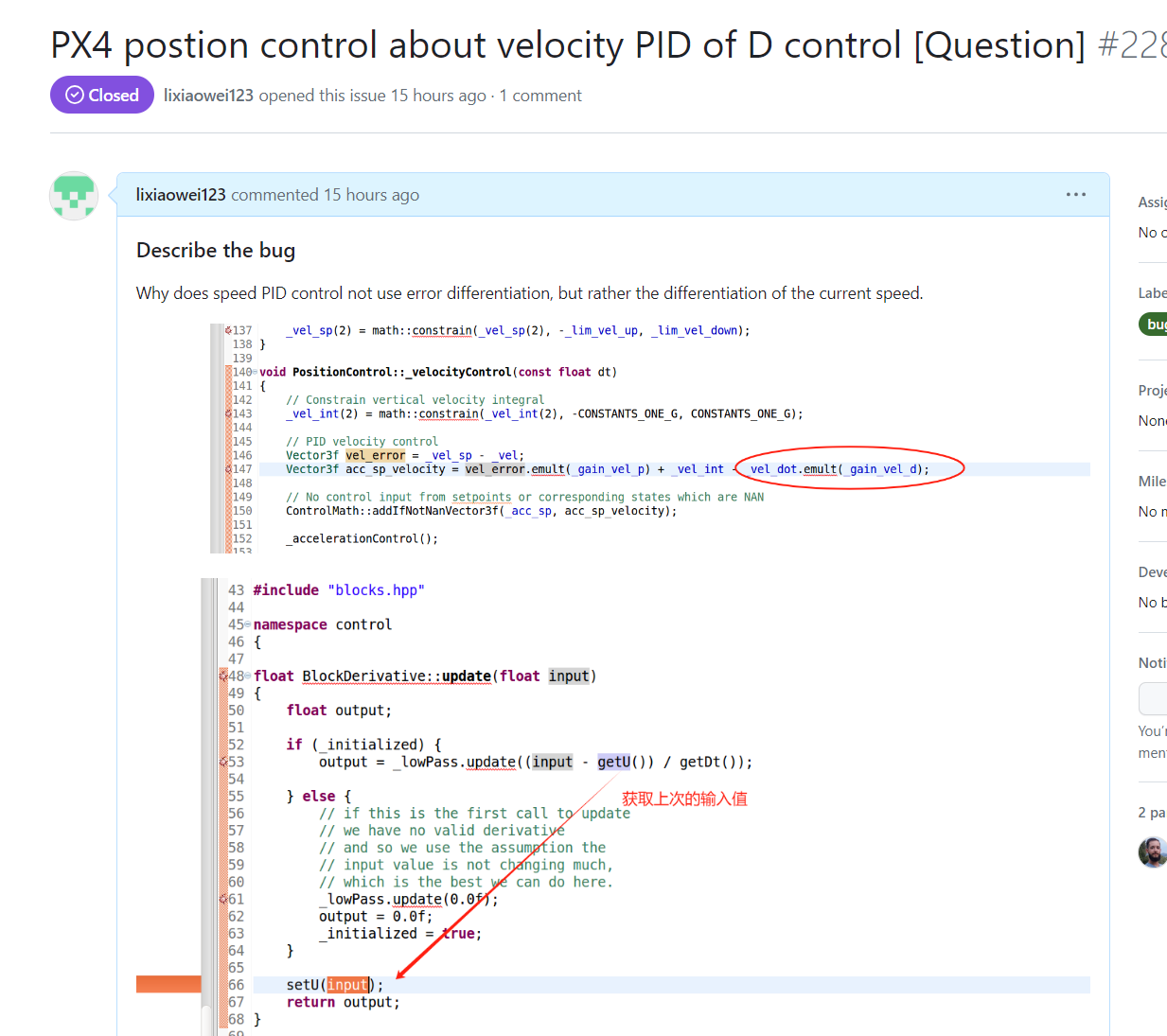
I don’t mean that, I mean the differentiation of PX4 sampling actual speed, while APM uses the differentiation of error