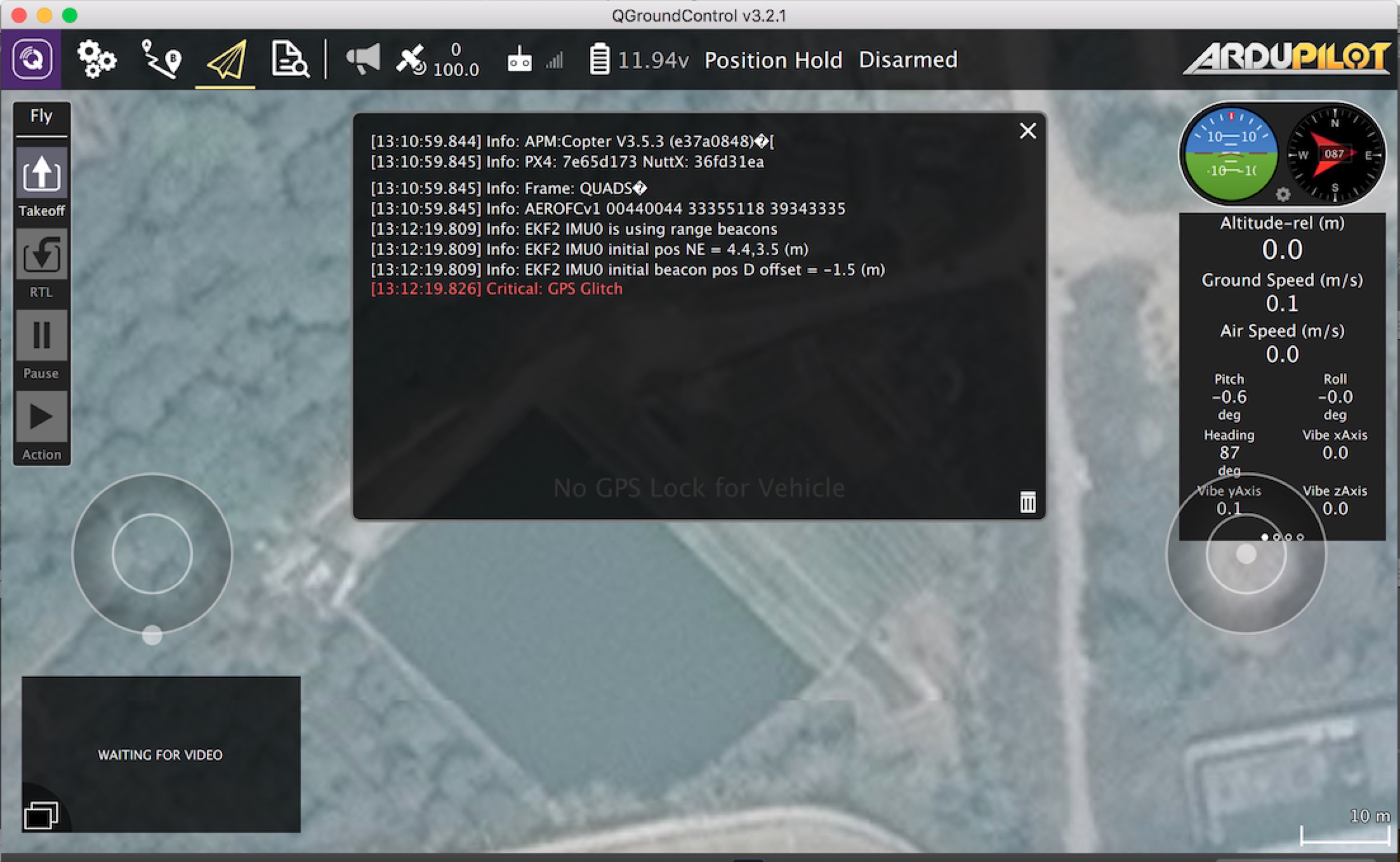
I have wirted a Parser compatible with posxyz data, and pixhwak1 can work with receiving data, but I have trouble with real filght(maybe the lower update rate with my UWB Equipment? like 3.5hz), In the same time I decide to improve my code in SITL first, I have setup my APM gazebo environment and wrote a UWB simulator(using data from gazebo pos topic), but after I send data to SITL copter, it’s does not show the beacon init message, and I also have trouble reading dataflash log by apmplanner
It should be possible to make it work. We don’t have a Beacon library backend which consumes the mavlink beacon messages so it sounds like you’ve got another way to pass in the raw serial data to the pozyx driver. I guess you’ve set the SERIALx_PROTOCOL parameter properly to tell the Beacon Pozyx driver which UART it should use? that UART/serial port will need to be separate from the one being used for mavlink data.
I think should begin building mavlink beacon messages in the same time, cause that’s a little bit hard to make two UART connect with fc by one comparison computer, my current solution is using usb hub in intel aero
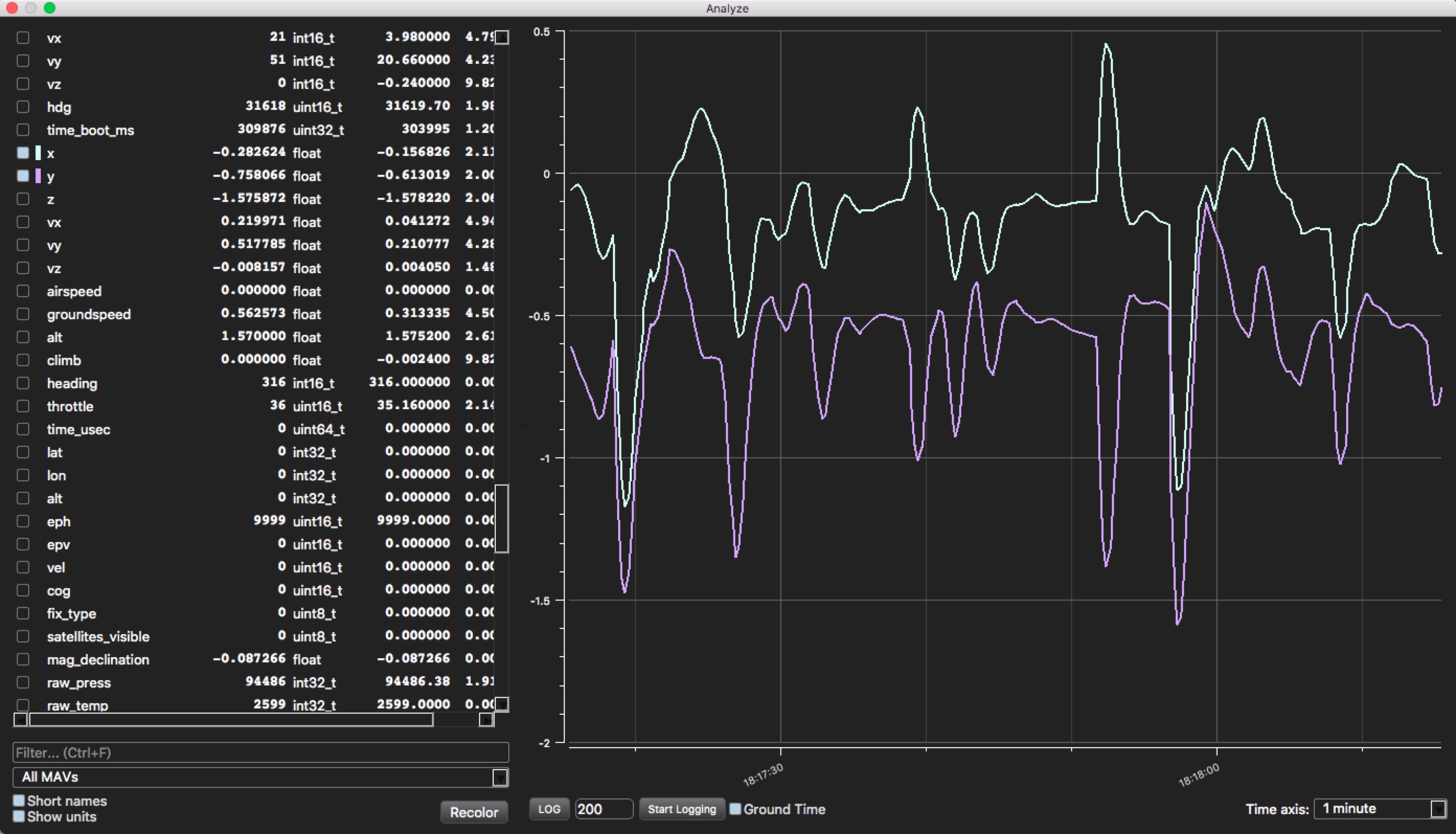
update: take off in alt hold mode and change to poshold in midair, it and hold position, but drift some time about 0.5m, I haven’t add any noise to Gazebo UWB Simulator yet, and refresh rate is 10hz
dataflash log: https://drive.google.com/open?id=1i1hSjg9hbz79S6The0Jb5UldQxj18C1i