I had been attempting to calibrate the voltage reading so the craft was in a failsafe, but the battery had plenty of power left when the craft was recovered. We were testing weight limits and had a 3lb sand bag of sorts to mock the weight of equipment we will be installing in the future.
I can’t say for sure exactly what caused it, but have a look in your logs at 195 seconds.
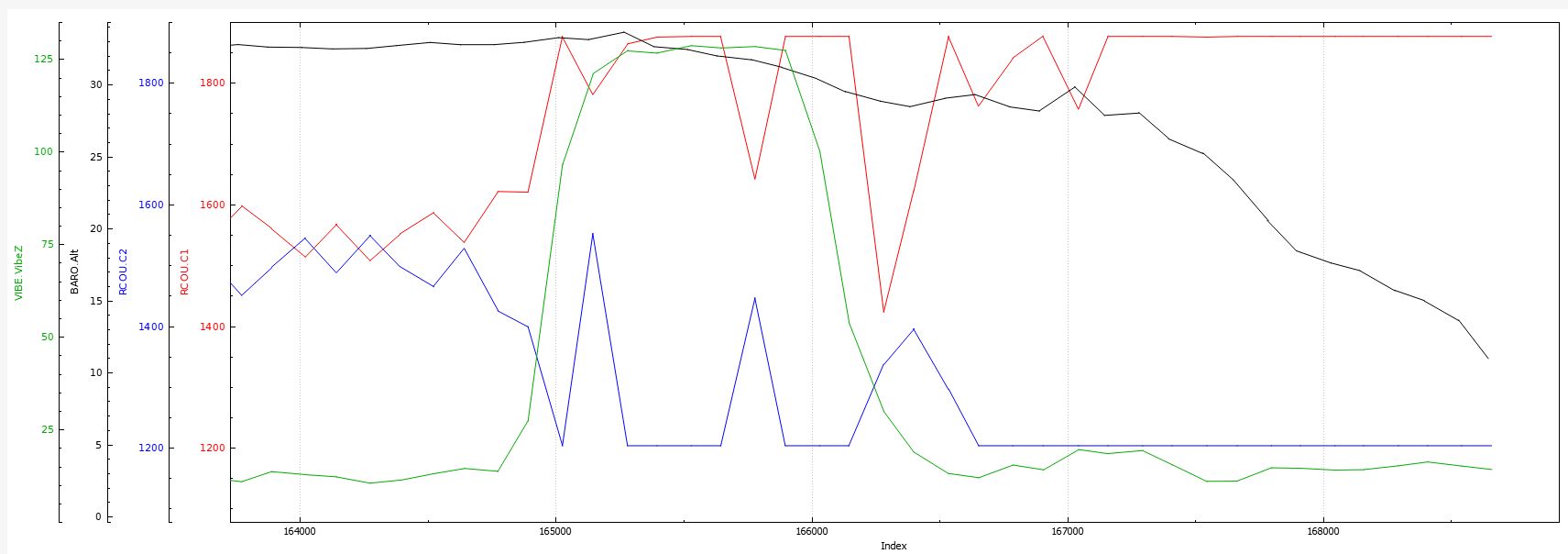
You had some form of event that sent vibes through the roof, maxed out current and dropped the battery voltage as the desired v actual roll/pitch/yaw went haywire.
Could you have hit something?
A motor desync’ed?
The maxed out amps is a bit strange, maybe a short circuit?
That’s odd. I rebuilt the drone today and all motors are spinning, so it’s not that a motor burned up or anything… The mission was set for 100 ft altitude and in an open field, so it couldn’t have hit anything. How can we tell if it was a desync? Maybe a prop broke mid flight? Can you tell if one particular motor drew more amps than the others?
Motor 1 indicates a possible loss of thrust because the output was driven to the max. Thus the opposite arm (Motor 2) tried to compensate by lowering the output to stabilize the craft. Commencing Loss of altitude. This is at the same time that Vibe Z went high. Broken prop on Motor 1?