Hello everyone,
does anyone can help me?
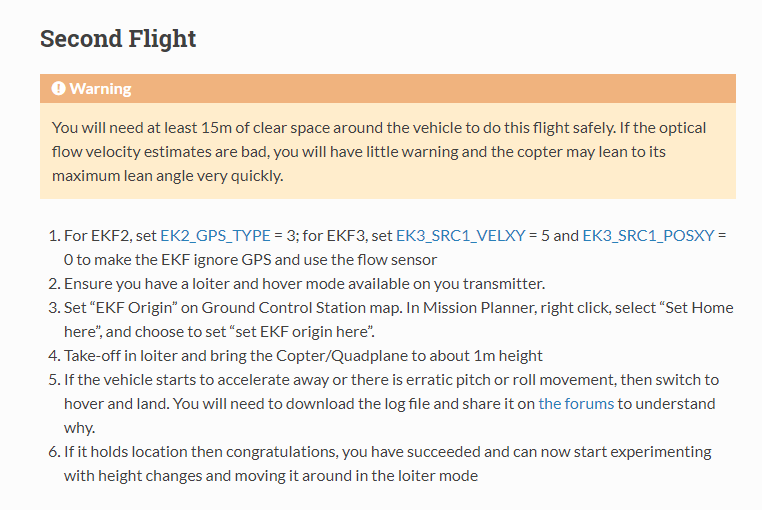
im at this stage of testing hereflow opticalflow
But within this step, when i armed.
its said “prearm : need position estimate”
How to solve this problem?
Hello everyone,
does anyone can help me?
im at this stage of testing hereflow opticalflow
But within this step, when i armed.
its said “prearm : need position estimate”
How to solve this problem?
Sounds to me like you have the geofence enabled and the GPS needs to record the position before it arms.
Furthermore it sounds like you are running ArduCopter 4.0.x.
Please update to ArduCopter 4.1.3-rc2 before using Optical flow.
I have use the 4.1.3-rc2
But same problem.
If in loiter mode it will have “PreArm: Need position estimate”
But if i change into “flowhold” mode.
It can armed and takeoff.
But its also not hold location.
Its moves around. Not too much but move around.
Have you tuned the pids?
Have you tuned the notch filter?
These are considered the minimum requirements for a proper non amateur flight.
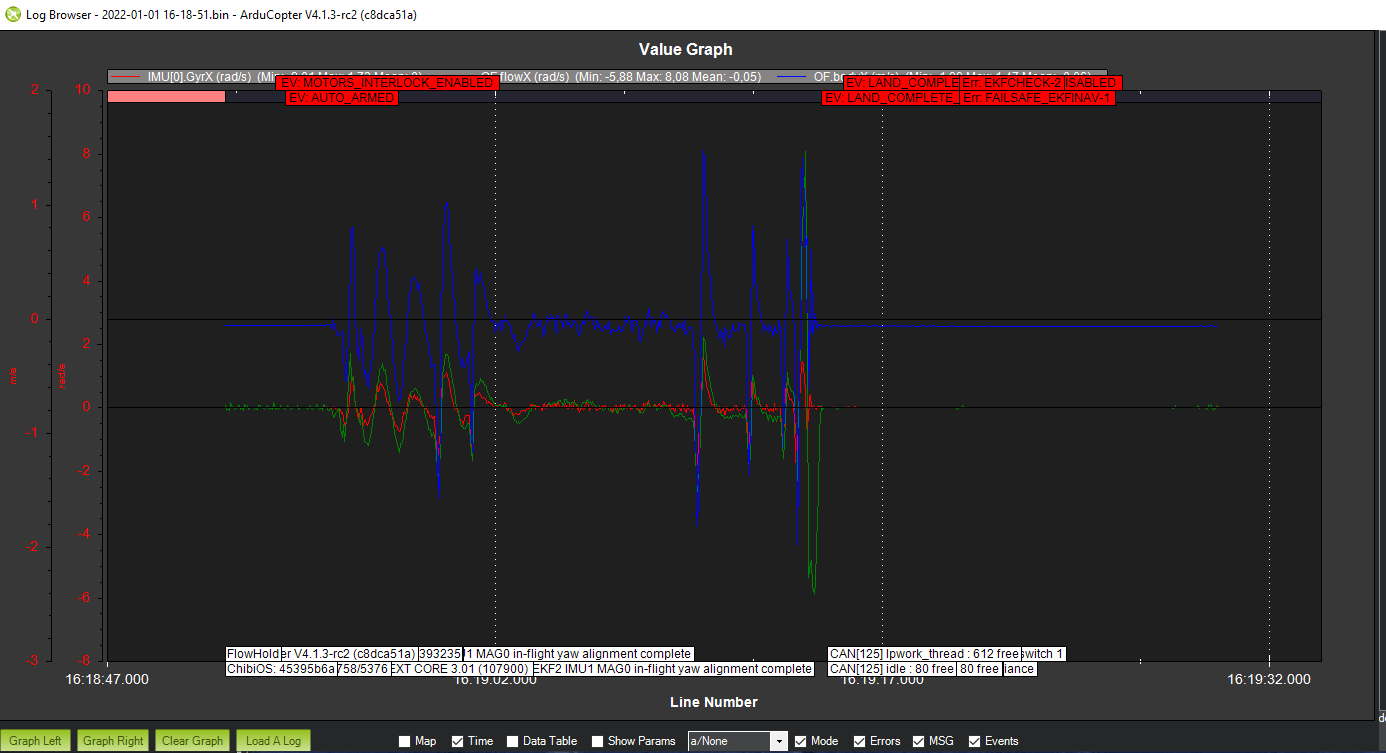
i have the log files
red = gyrX
green = flowX
blue = bodyX
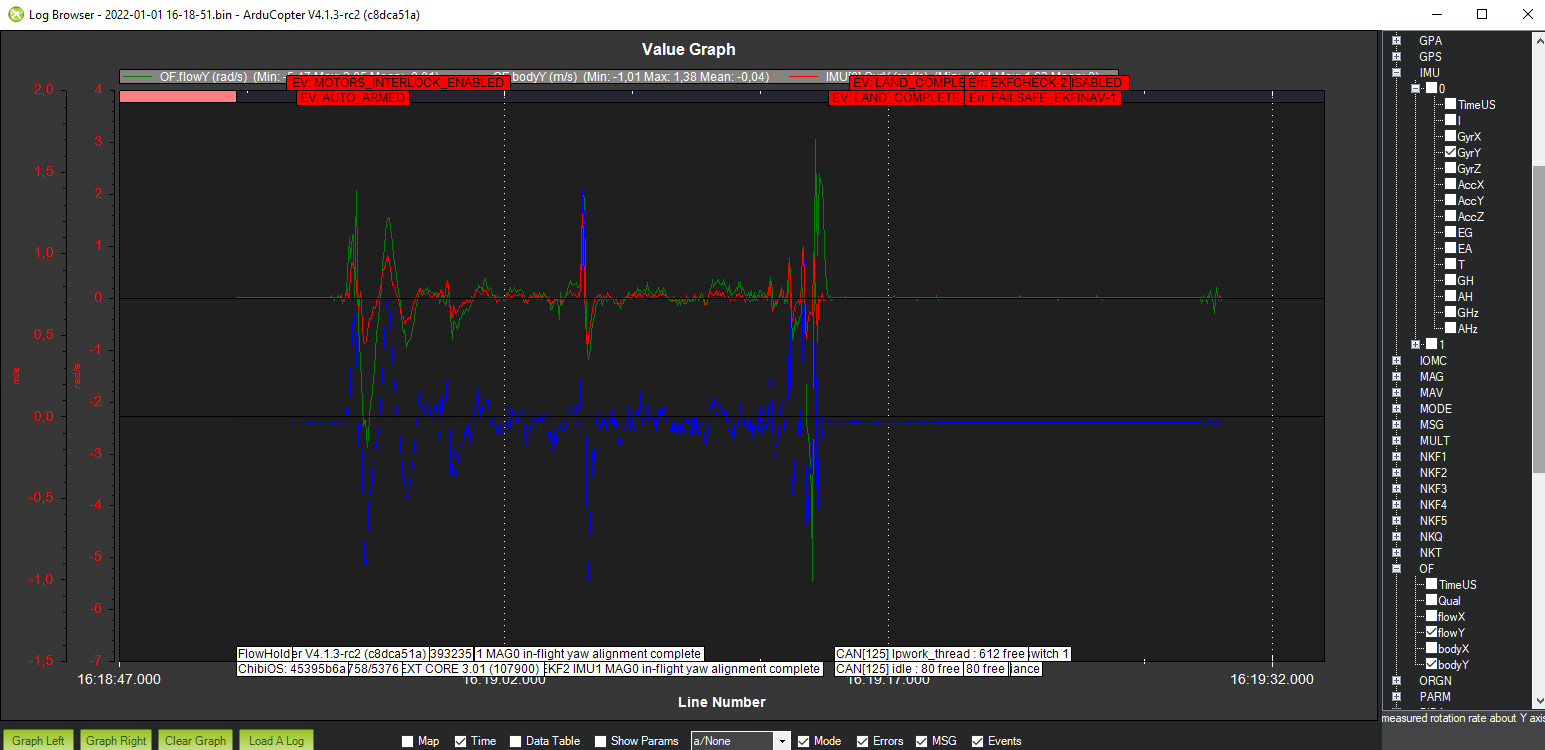
and this red = gyrY
green = flowY
blue = bodyY
is this graph is correct for optical flow?
I have no clue.
But please do answer my questions above. Without proper tuning not even the best OpticalFlow in the world will make your vehicle work as you want.
Actually i autotuned before.
But when you tell me to update to 4.1.3-rc2.
Im not sure does the autotune is back to default or stay.
To make sure i will do autotuned again.
And try optical flow again.
Thank you so much for your help.
I will update after i do autotune.
An update preserves (or converts) all existing parameters
The real questions are:
did you properly perform Tuning Process Instructions — Copter documentation before doing the autotune?
Did you configured Managing Gyro Noise with the Static Notch and Dynamic Harmonic Notch Filters — Copter documentation before doing the autotune?
The autotune is not a magic solution to avoid doing work! It only works great if you do a bit of homework first.
Oh i just know about this now.
Really thank you so much.
I will follow this step one by one.
I just thought setting is fine because if its in loiter mode with GPS help.
Its hold location. Stay good and stable.
But if try no GPS.
And use flowhold only.
It never stay and hold location.
Anyway now i will follow this step one by one.
Thank you so much for this.
I really appreciate.
I will give update once i finish all this step and repeat the flowhold mode.