Hi all. I have made progress with the testing of the Sky Chaser full scale prototype without a flight controller. It seems to be working, but I would like to get your opinion. As you may recall I chose to remove the flight controller because it was causing the motors to shut off in mid flight. I have tested the full scale vehicle in Realflight 9.5 and it seems to fly quite well without a flight controller since the vehicle is so large and has large rotational inertia, thus giving the pilot time to stabilize the vehicle. The only problem is that there is a 1 second delay. But again the flight simulator shows that this is not a problem once one gets used to it. Here is a link to see the flight simulation:
https://drive.google.com/file/d/1LcJQWlslJxcqzgwmRZYQ8s5He7Yb4fz1/view?usp=sharing
Testing has gone slow since the vehicle seems to not be trimmed out to fly straight. In our first test the vehicle took off and stabalized ok. But started yawing left and rolling right. When it flew forward, it entered a Skid condition, where the oncoming airstream got under the right side of the wing and almost flipped the vehicle over when I tried to correct for the right roll. Here is a link to see a video of the the test flight:
https://drive.google.com/file/d/161h3PDc7_Z3c9iceEhoxLP1bT1LLOhFm/view?usp=sharing
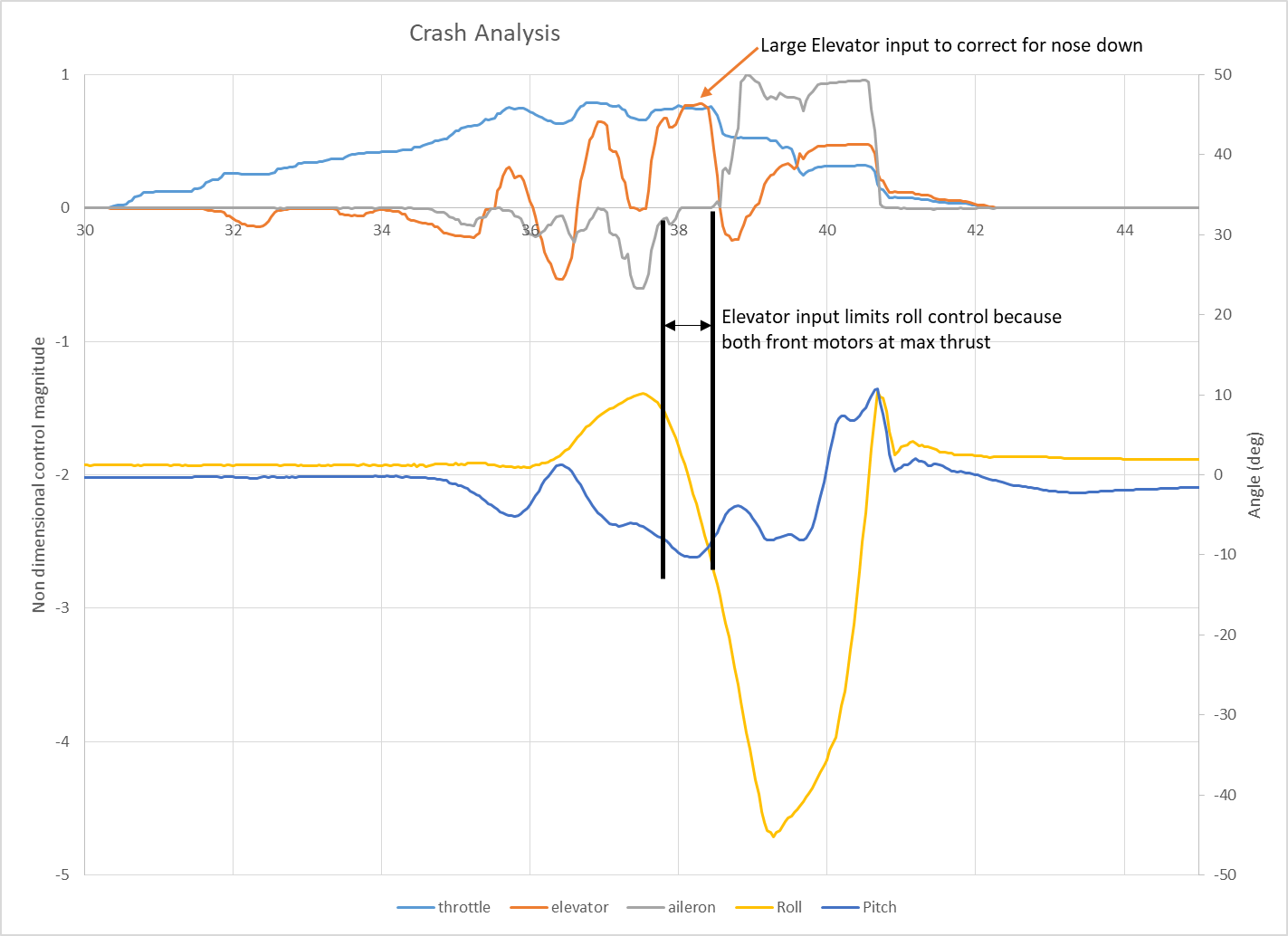
Although I did not use a Flight Controller to stabilize the vehicle. I did use one to record the TX stick inputs (Throt, Ail, Elev, Rud) and the resultant vehicle reactions (Pitch, Roll, Yaw). Here is link to see these signals during the flight:
We took some washers out from the left side of the back motor to make it tilt less, and reduce the left Yaw, and we gave some left Aileron trim and tried it again last week on a grass field. The vehicle took off very well with out a Skirt (used to previously back motor thrust escaping under the side panels, thus creating a vacuum) and it flew quite stable for about 100 m. The vehicle still Yawed ~16 deg during the flight, but the Ail trim must have been too much since pulses of right Ail control were needed to fly level. When I got to the end of the field, I tried to give the vehicle a slight amount of left ail to see if I could turn it. But the vehicle rolled left a lot more than I expected, so I decide to land the vehicle quickly because I was getting very near a ditch and a road. Here is link to see the flight:
https://drive.google.com/file/d/1LTt6YRxX7uRqZrZJWKk5fNPrJcutDGnn/view?usp=sharing
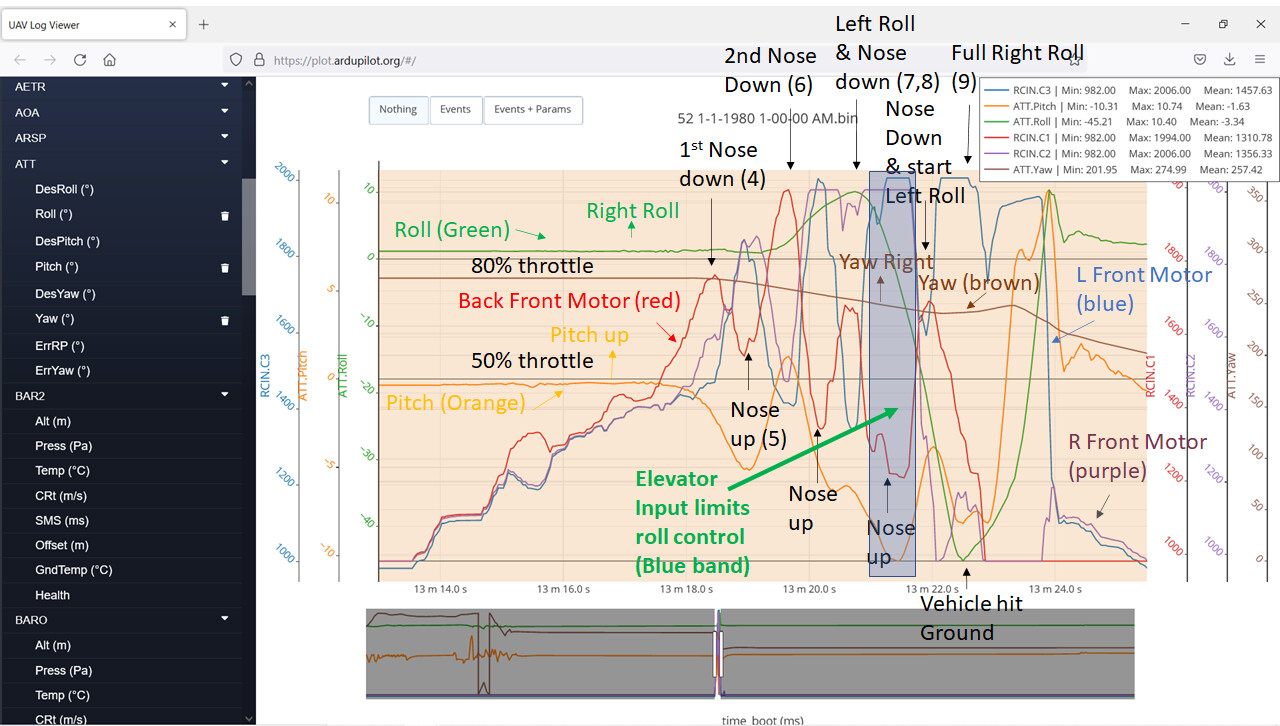
Although I did not use a Flight Controller to stabilize the vehicle. I did use one to record the TX stick inputs (Throt, Ail, Elev, Rud) and the resultant vehicle reactions (Pitch, Roll, Yaw). Here is link to see the results:
https://drive.google.com/file/d/1N1e255hM4cKyZlBiuFDqDY9fxJOD_1Z2/view?usp=sharing
To me everything seems to be ok. The vehicle seems to be responding well to Pitch and Roll commands. But Yaw control has not been tested yet. My plan is to Take out a few more washers on the left side of the back motor to correct for the left Yaw and to reduce the left Ail trim in the transmitter to correct for the left Roll. I will then try to fly in a large circle around me on a large grass field, and use the Rudder and Ail to weave about this circular pattern to test their effectiveness.
Your comment would be appreciated. Thanks,
William
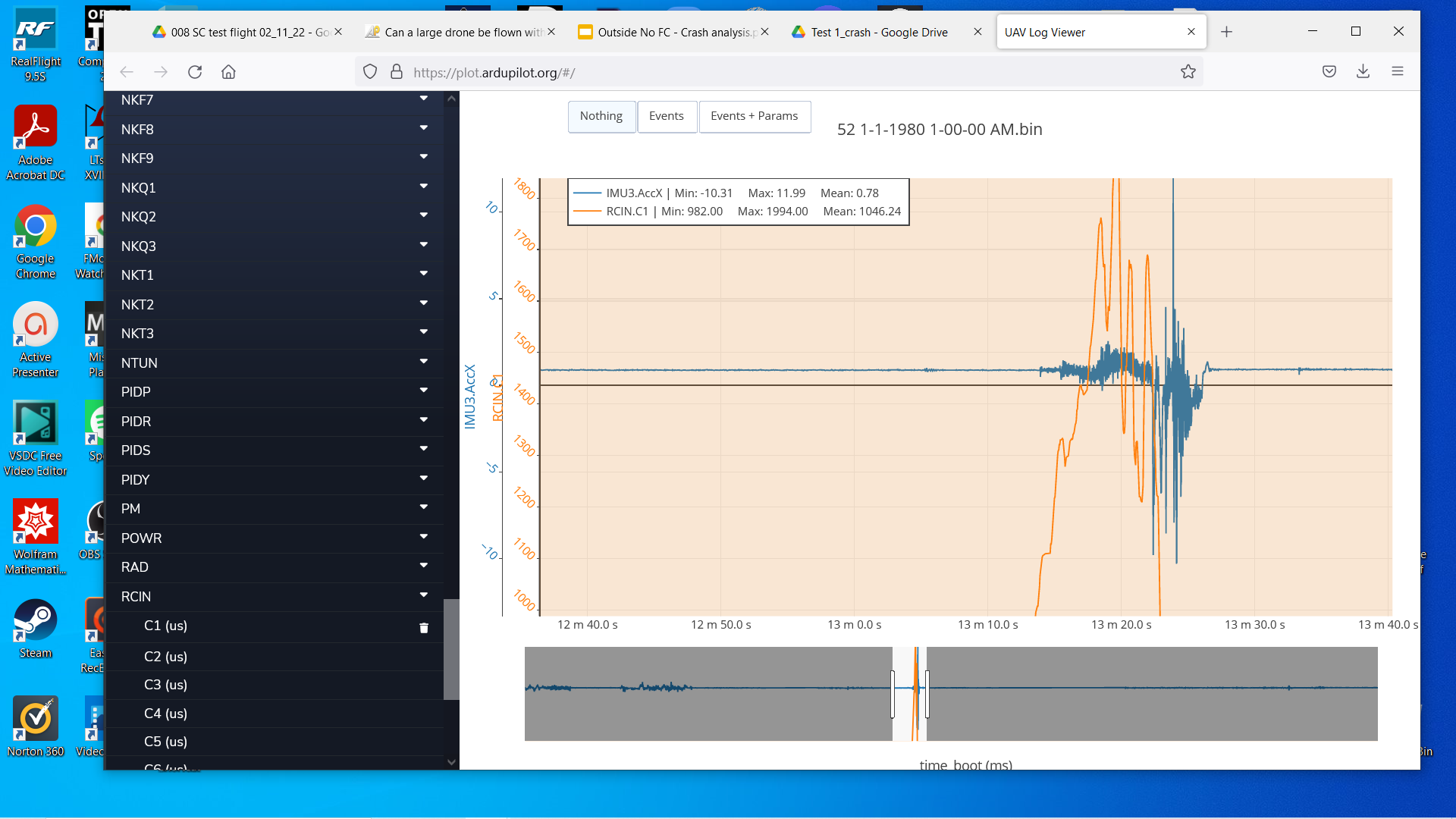
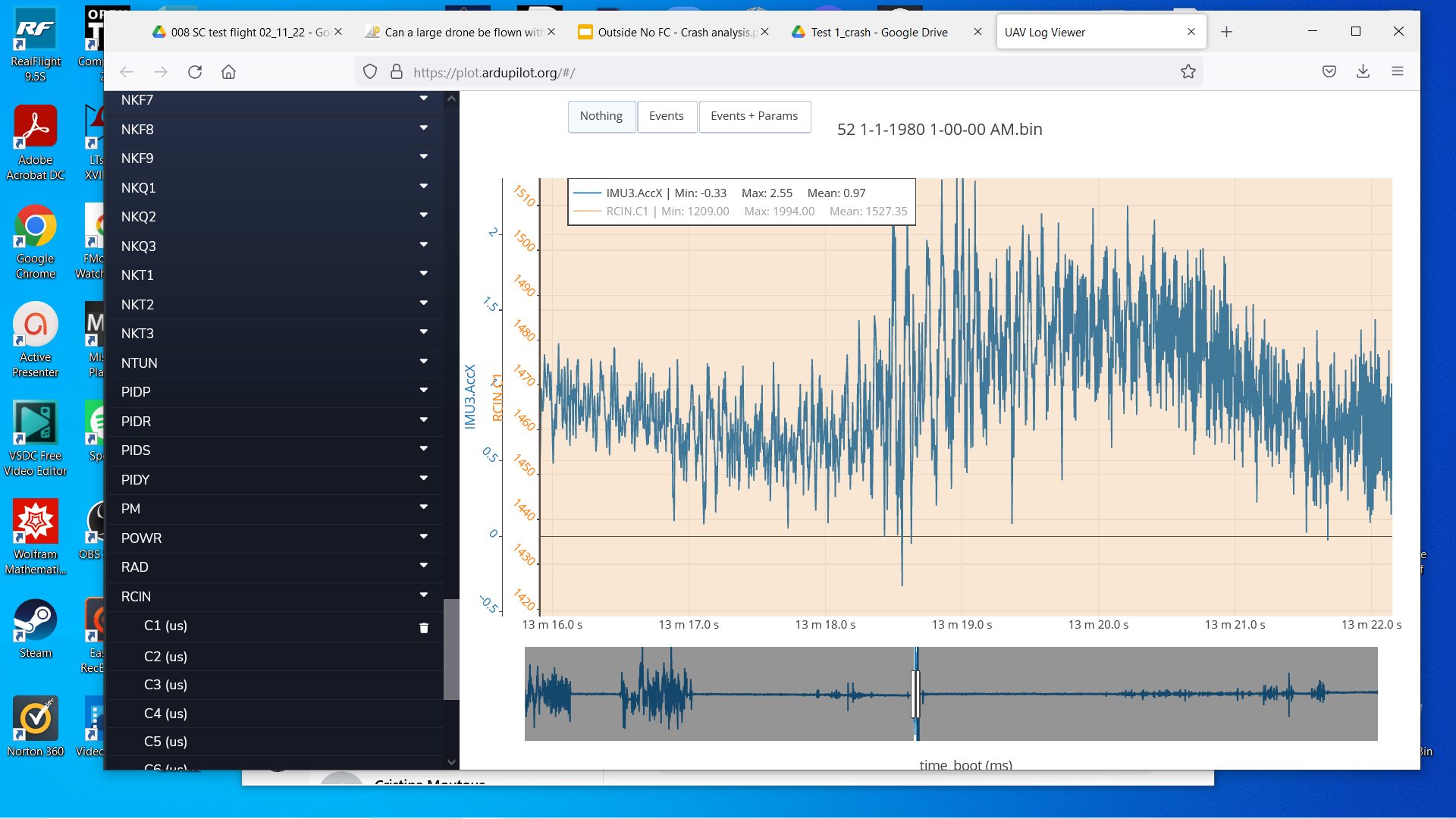
P.S. I should mention that Bill Geyer helped me develop a SITL model for the full scale vehicle for Realflight 9.5. It seems to work ok, but not nearly as well and as smooth as flying it without a flight controller. I hesitate to use it because the flight controller has stopped the motors repeatedly during numerous test flights due to the motor signals railing. Here is a link to see one of the tests where the flight controller stopped the motors in mid flight:
https://drive.google.com/file/d/1gxa5mDEFPype01eP6R1W1ZBdAjq6iy_z/view?usp=sharing
Log file:
https://drive.google.com/file/d/1kSqEx0E3emf8R_CD-Wx1iPFjBJELHhlx/view?usp=sharing
Bill changed some of the acceleration and angular acceleration parameters in the SITL model to reflect those expected in the full scale model. But it is not clear if this will fix the problem and I don’t want to use it to test the vehicle until it is flying better. Currently the vehicle hovers at 70% throttle and this does not give much headroom for the extreme maneuvers often encountered during initial testing. Once the vehicle is flying better, I will reconnect the flight controller and try it again because we eventually want the vehicle to be able to fly autonomously.