Hi there,
I am still quite new to mission planner and Pixhawk but im starting to understand it. What I want is quite simple, I am trying to build a mapping system that can be mounted to a car. I Plan on using the cam trig distance function of mission planner. So far I have been able to connect my Sony A7s cam to the Pixhawk via a modified cable plugged into a aux port. I have also figured out how to trigger the camera by using the relay setting. If I right click on the flight data tab and select “Trigger camera NOW” the camera takes a photo.
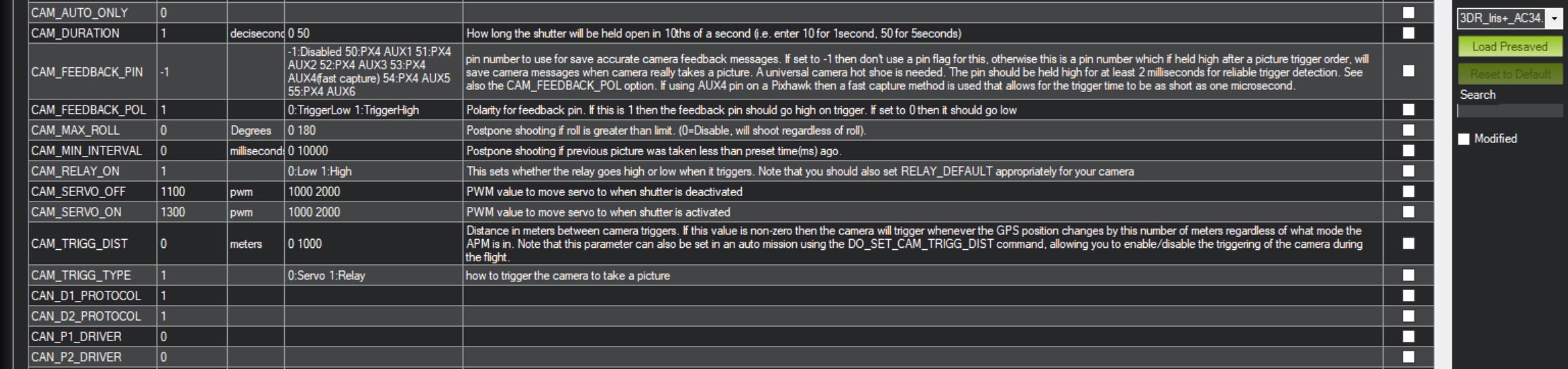
Where I run into problems is when I try to configure the Pixhawk to capture photos in regular distance intervals. in the full parameter list I can configure Cam trig distance to take a photo every so many meters, but when I try add a way-point to activate and deactivate the camera at different parts of the mission using the Do_set_cam_trigg_dist it doesn’t work. It seems as though the way-point is unable to change the value in the cam trig dist parameter. because use if I manually change that value to 1m In the parameters tab the camera starts taking photos.
Further mode I am using mission planner v3.6.8 and Pixhawk 2.4.8 configured as a quadroter with the camera connected to CH7
Am I missing something here, After setting the Do_set_cam_trigg_dist I simply write the way-points. so they appear in the flight data panel.
I have included 2 screen shots.

Any extra info on this topic would be much appreciated,
Kind regards,