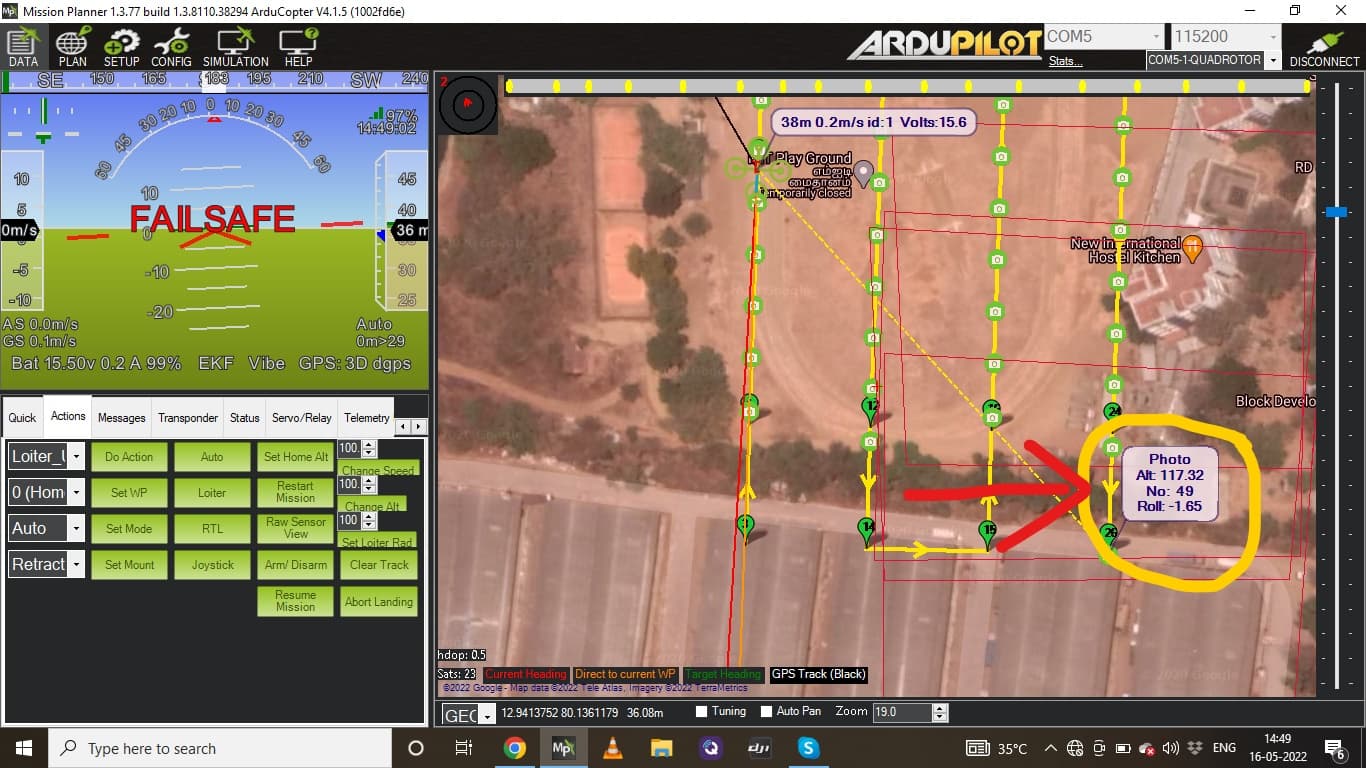
I’m using MAP 2 mapping camera from FOX Tech which trigger by the Ardupilot(arducopter)using relay method.https://www.foxtechfpv.com/foxtech-map-02-camera.html
as per manufacture instruction we should do manual trigger using push button the camera twice after power on.
first trigger will get into picture capture mode and second trigger will take one snapshot which indicate camera now working normally. again i have triggered manually one more time to check weather camera working normally.so in ground itself 2 photos saved without autopilot command
then using arducopter i have flown some area to collect the data .total photos 77 including ground photos.so here 75 photos triggered by arducopter FC.
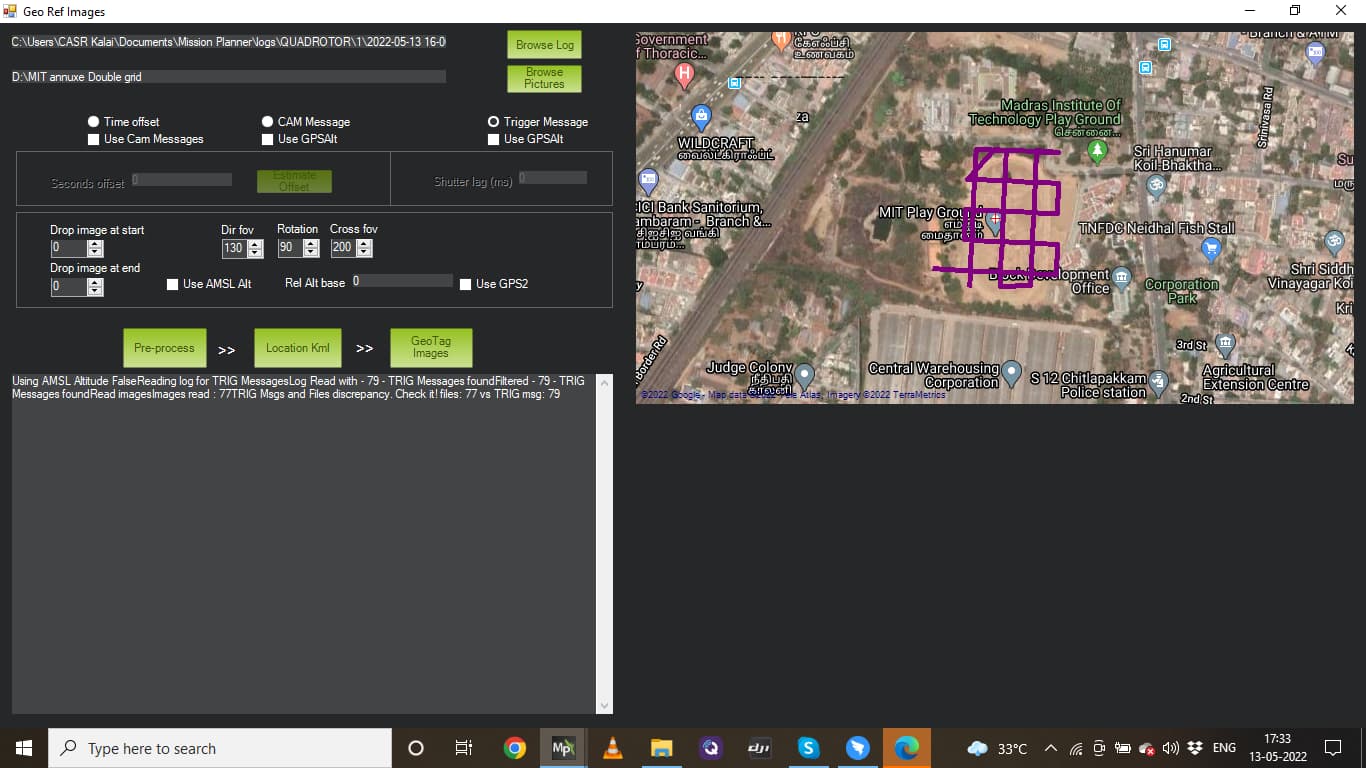
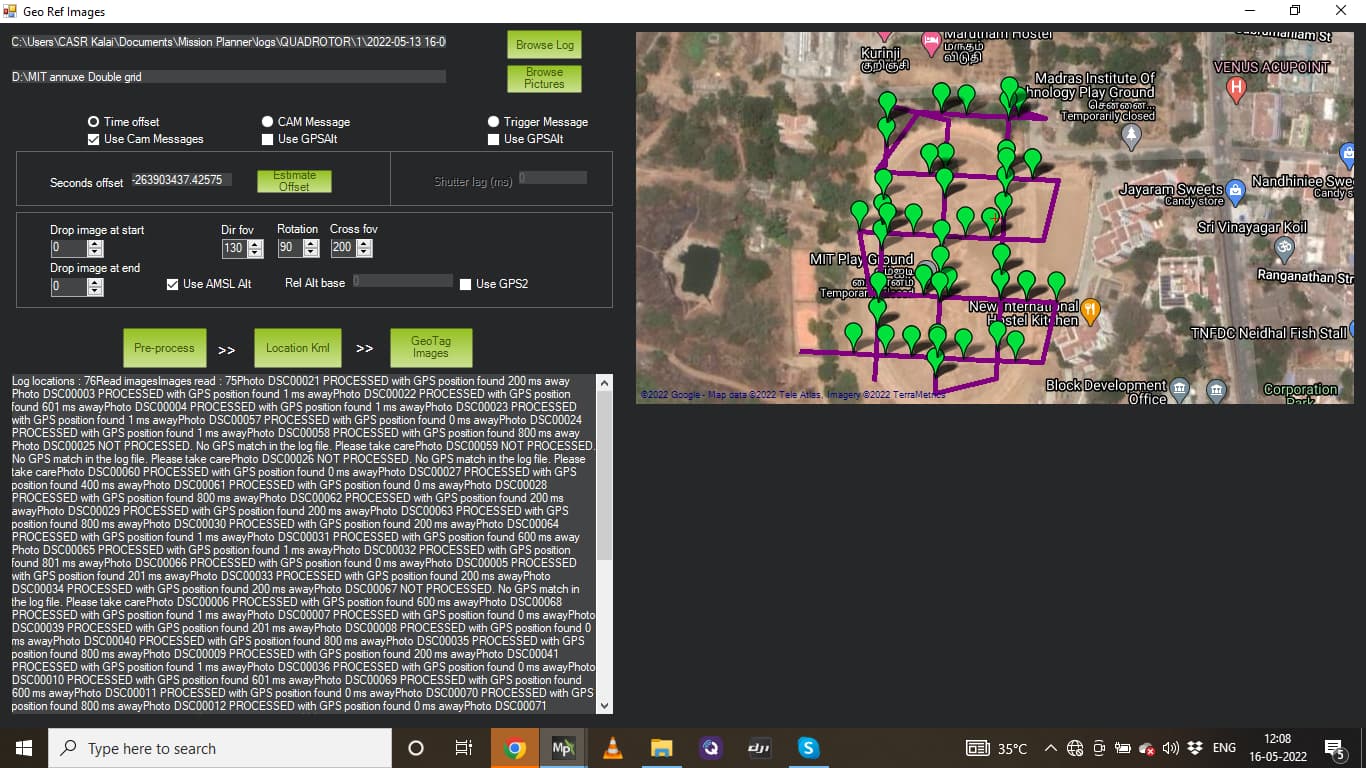
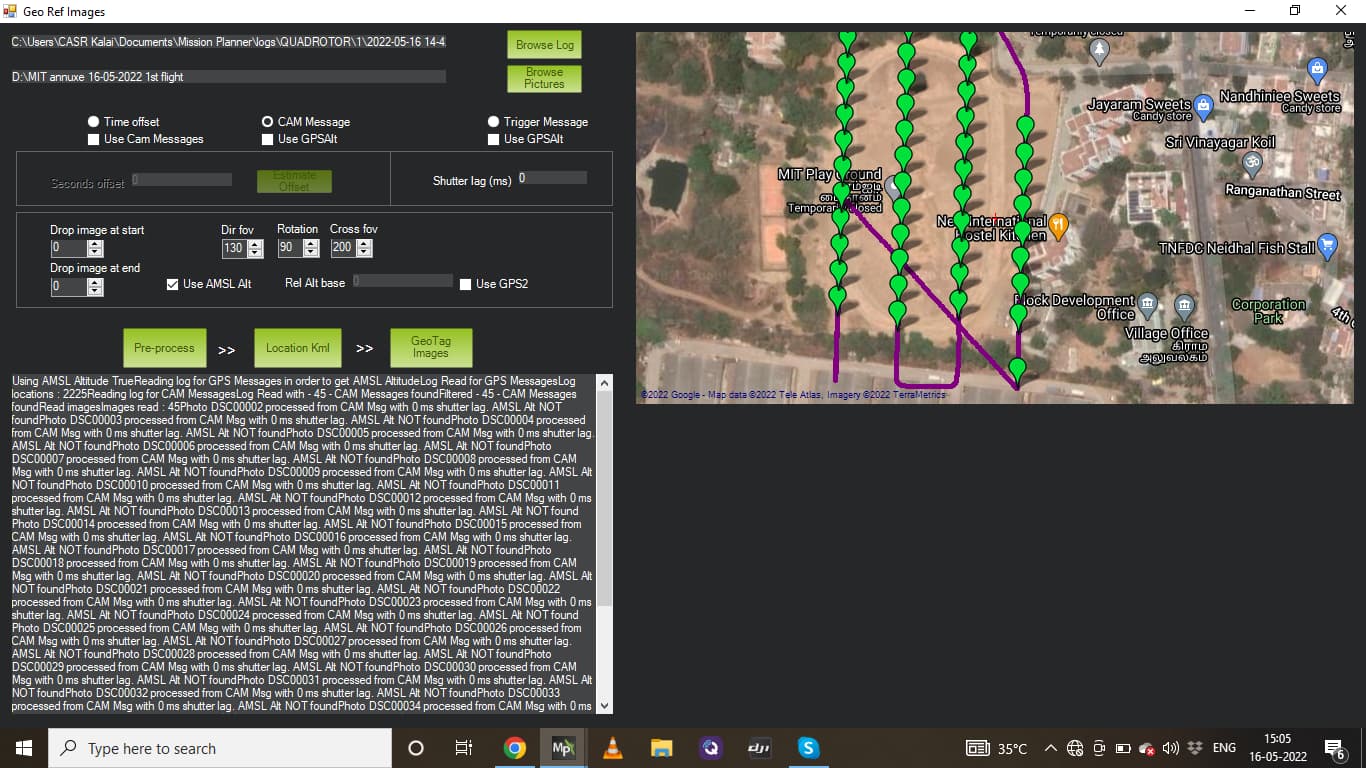
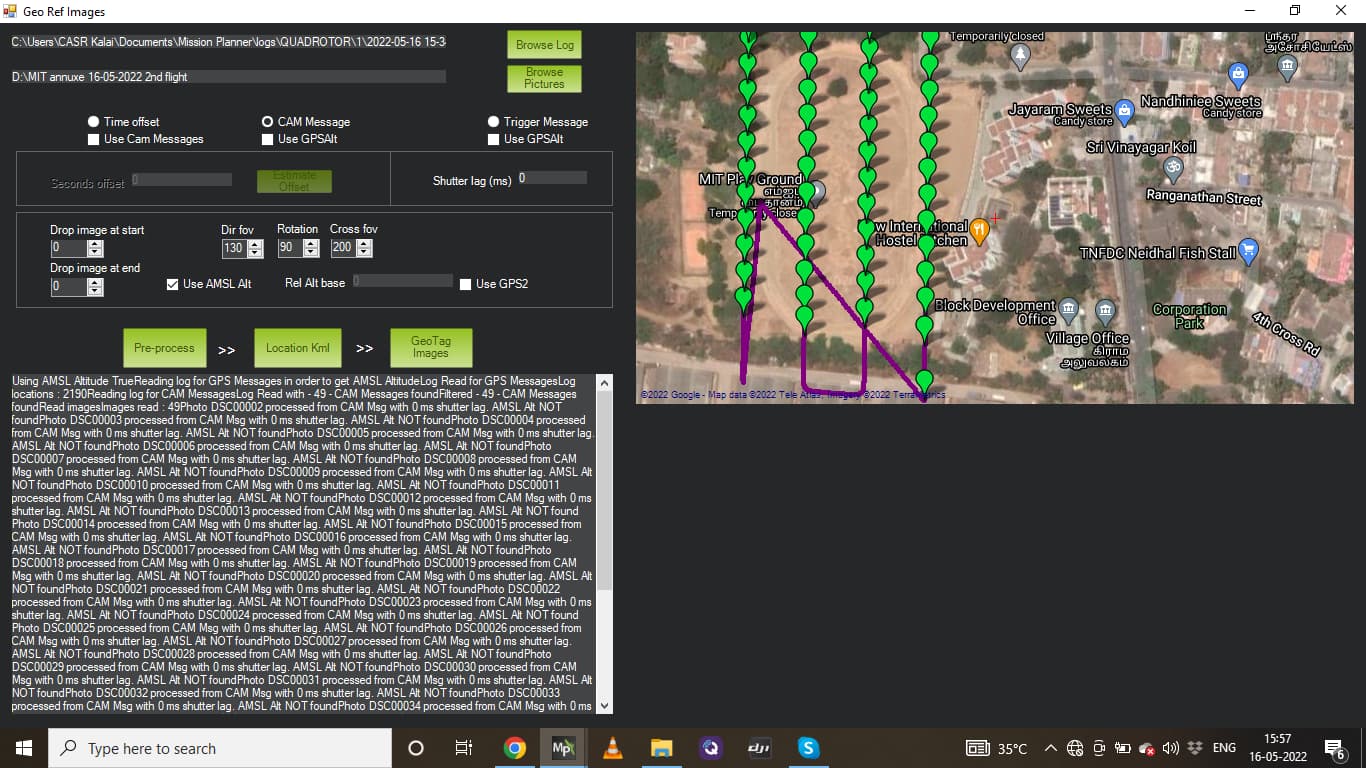
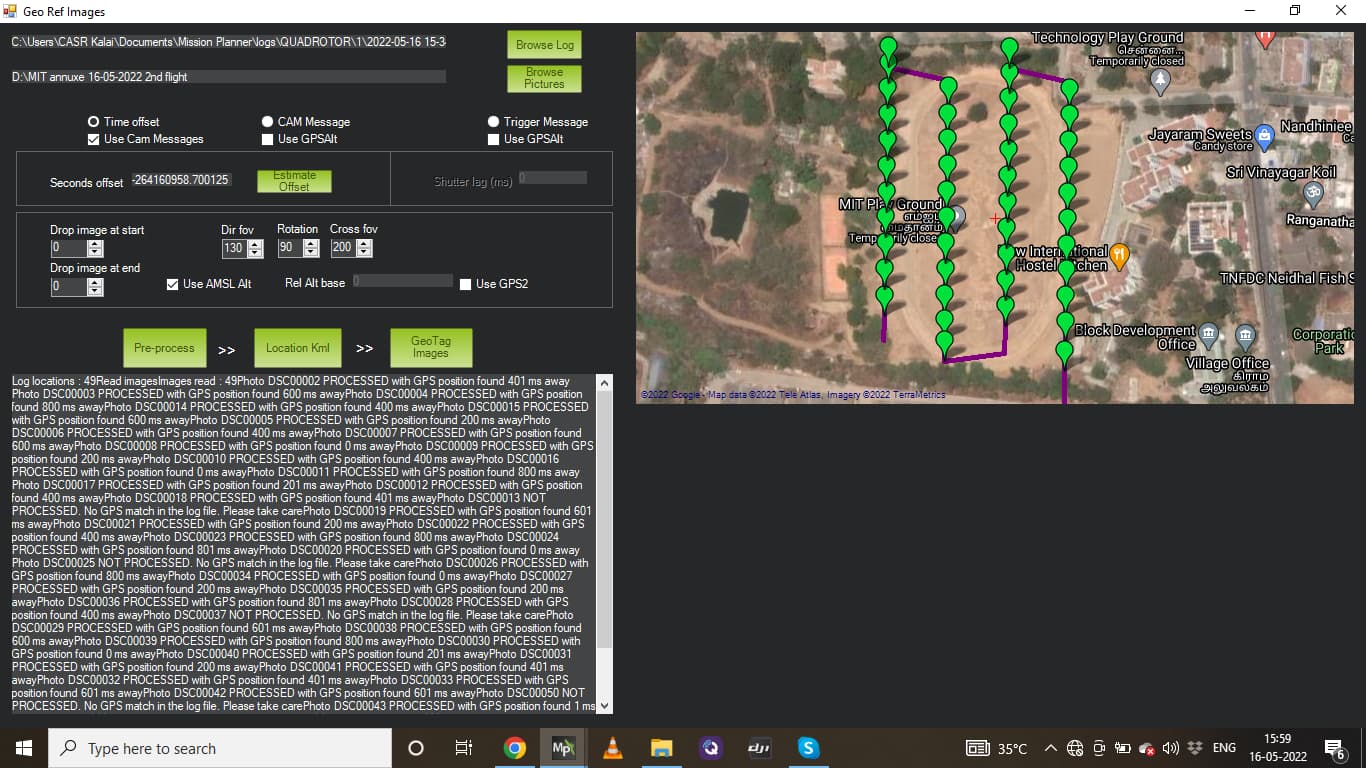
but when i try to geo tag the images with mission planner there two different options which is CAM messages and Trig Messages .
1st image pre process by Trig messages which shows 77 images on folder but 79 trigger messages .how come that two extra messages .
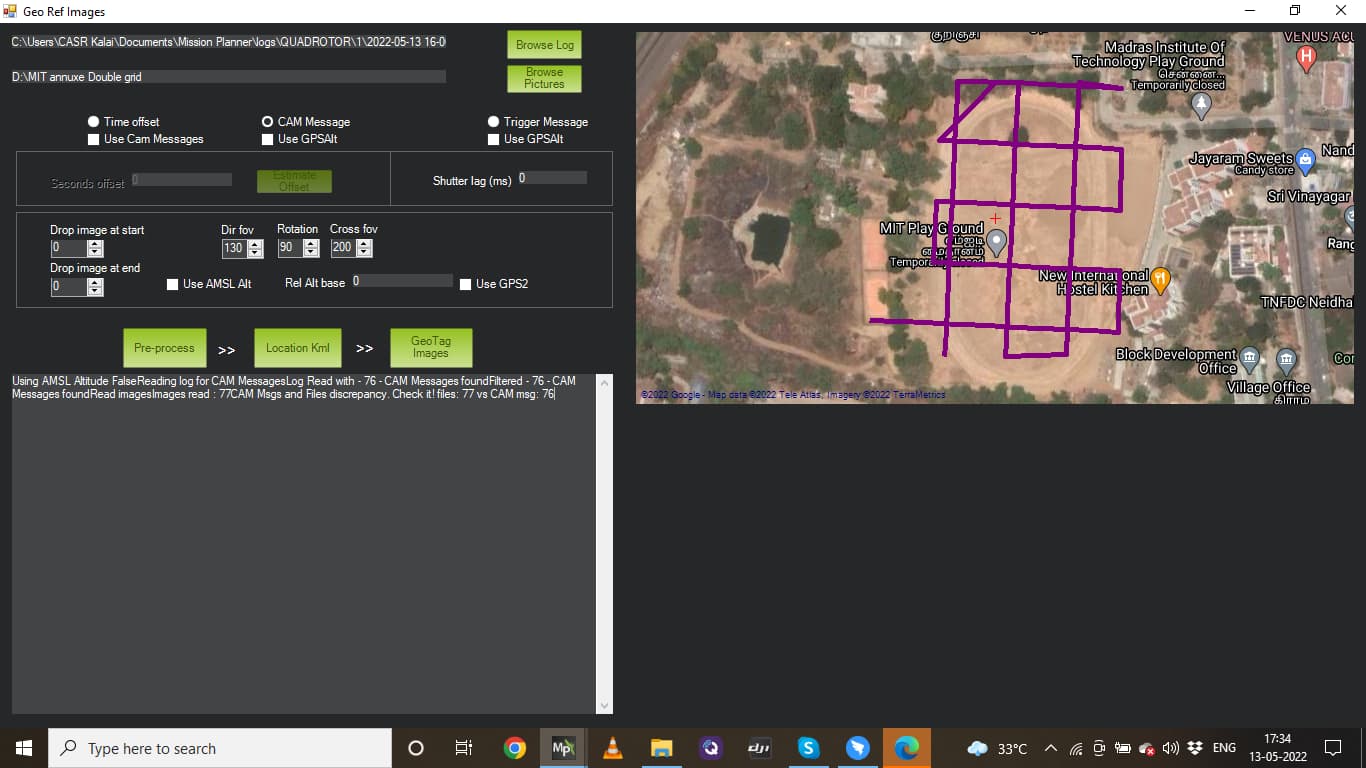
on the second image pre process by Cam messages which only 76 messages. how come that one short.
as per above statement the autopilot should have only 75 trigger information …but no where its matching how to geo tag the images .
what is the difference between CAM messages VS Trigger Messages .which one i have to choose for my application?
thank you @Michael_Oborne for your attention .i here tried that but still i get 76 cam message and 77 images … 2 ground image triggered by manually using push button so that should not come to an account. so Cam messages should 75 only.
It’s a common issue, that can be happen for various reasons. Ie a cam message didn’t result to an actual photo taken due to speed or camera etc etc. On the other hand testing pics don’t count to the auto messages, thus you end up with more photos than msgs.
A clean setup with a proper cam shutter setup and a trigger feedback will give you consistent results.
A work around:
-If you have more photos than msgs, then just delete the testing photos (on ground) and repeat the process.
-If you have less photos than msgs, then just copy and paste the last photo as many time as you need to match the number of msgs.
Find out what’s going on:
Use a software like geosetler to check out your exifs.
Usually, all photos will have a common time interval (considering you use trigger dist and a constant speed). If you observe very unusually close intervals then your camera most propably double fired producing more photos. If you observe an unusual gap, then most probably you lost a capture in that interval.
Common errors:
-Shutter time too short (Mission Planner/ camera gimbal/ shutter/ time ), or too long interpreted as focus by camera.
camera mode, meshing or inducing latency (Auto, eye care, smile detection, auto focus etc) use S (shutter speed) or M (Manual)
-too short intervals. MP will calculate the time interval between images based on overlap and cruise speed. Usually most cameras can’t handle under 2-3Sec intervals to shoot, encode and write the photo to their SD card.
-type of shutter (cable, converter, pwm, relay etc)
Around 3 consequent flight which same flight speed ,same area ,same mission but out of three the second flight i got correct trigger or cam message vs images taken.
But other two flight were flight controller trigger messages higher than images taken.
But here too can message shows different messages vs trigger message.
As you said adding photos to match trigger message doesnot solve the purpose.
I’m using camera mode as Manual and shutter 1/1250 ,camera Focus is AF-C .as i already mentioned in the forum trigger method is using relay.
SD card used is SDXC class 10 writing speed is 48Mbps .
So, if I understand correctly, in most cases you have less number of photos, you are using some short of Sony based camera (most propably 5100 or 6000), which you trigger via relay.
The most common fault factor for this setup is the relay vs the relay time.
I strongly suggest to use a USB based trigger, such as a seagull map2 which will give you extra features and consistently pass all commands from your controller. For even better results you can use a hot shoe feedback if you have a6000 or higher (a5100, feedback is just a coupled shutter cable).
Try to:
Add an rc in channel to trigger the camera (rcxx options) and fire it up with let’s say 1-2sec interval and listen if your camera can keep up and take those photos in the ground)
copy and paste the last photo and let it with name copy of xxx given by Windows. Then try to geotag via cam msgs. Most probably geolocation will be shifted by one photo, but it’s sufficient to resolve and use control points afterwards.
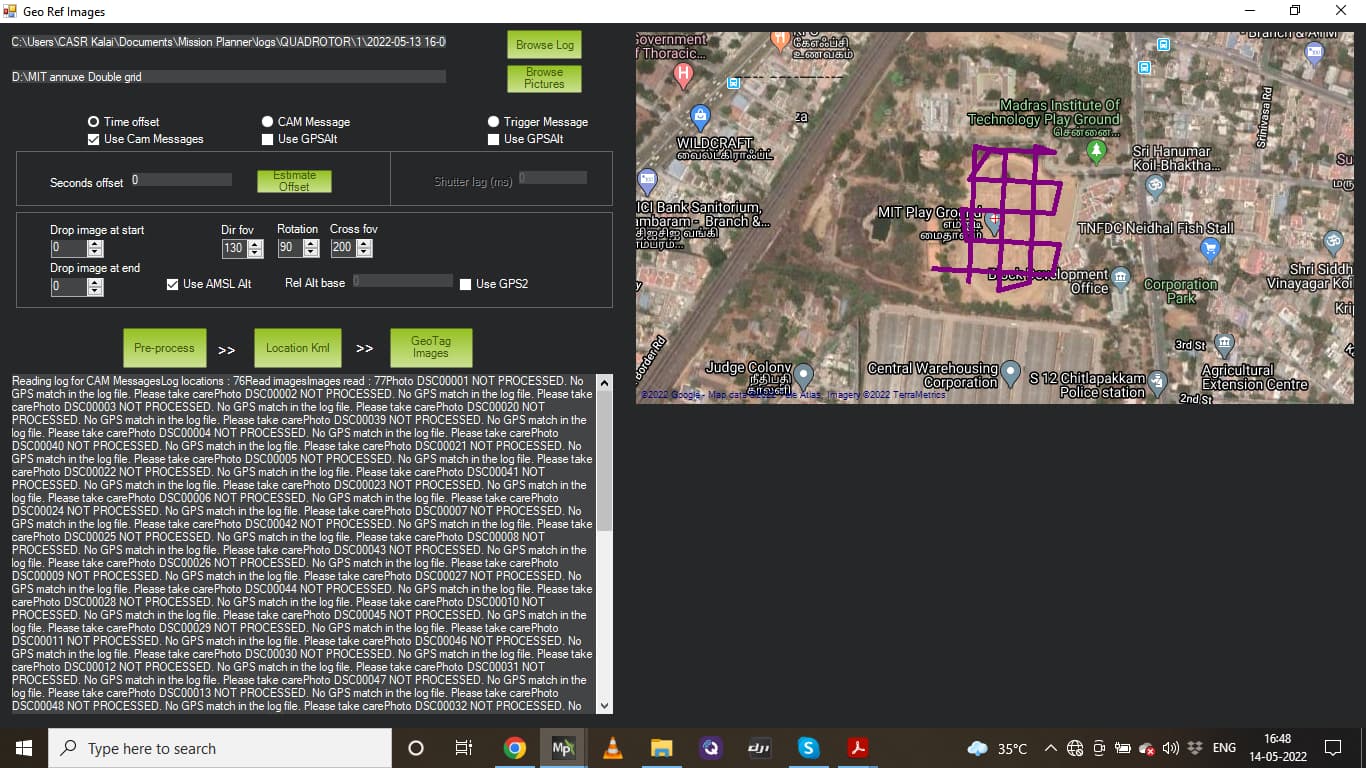
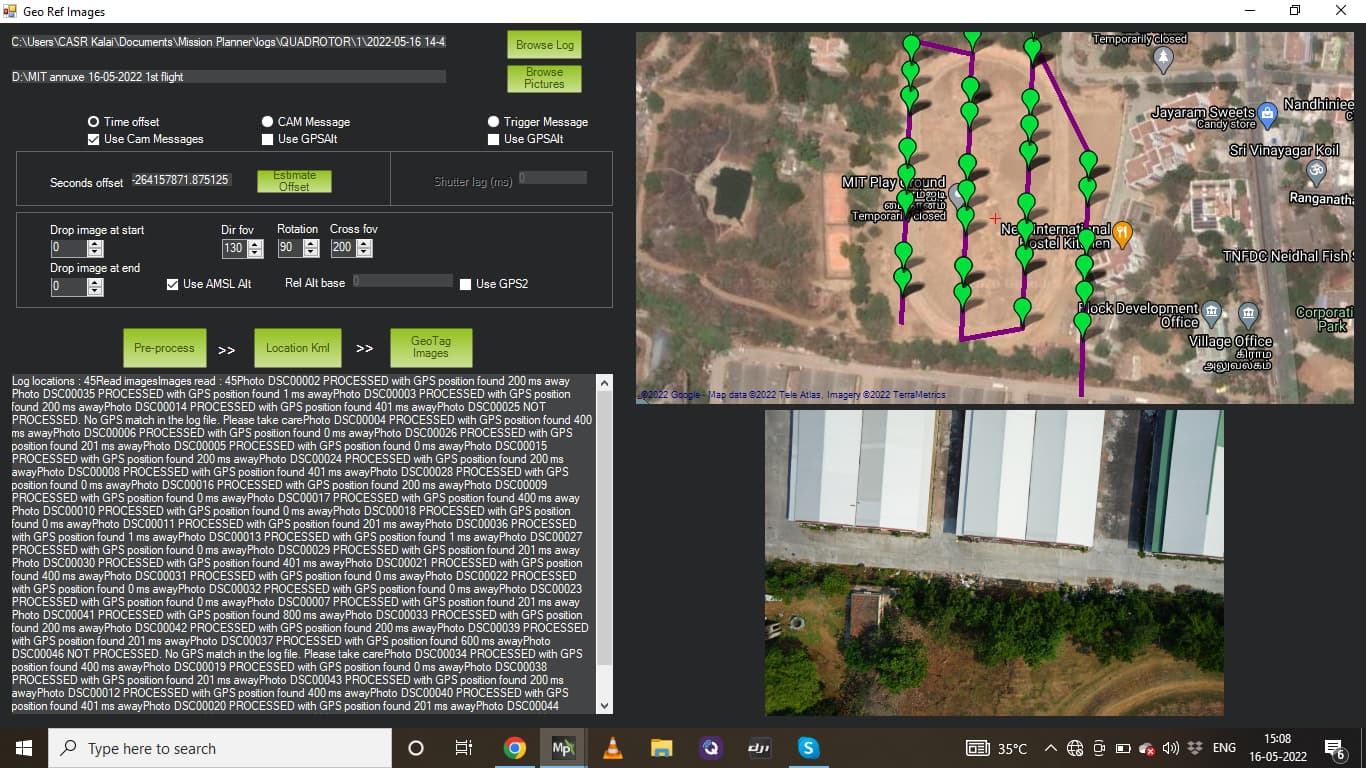
then copied those offset value then start preprocess but still i got cam messages is 76 VS images is only 75. and also see the geo locations are spread over all area with unequal intervals …this is totally wrong.
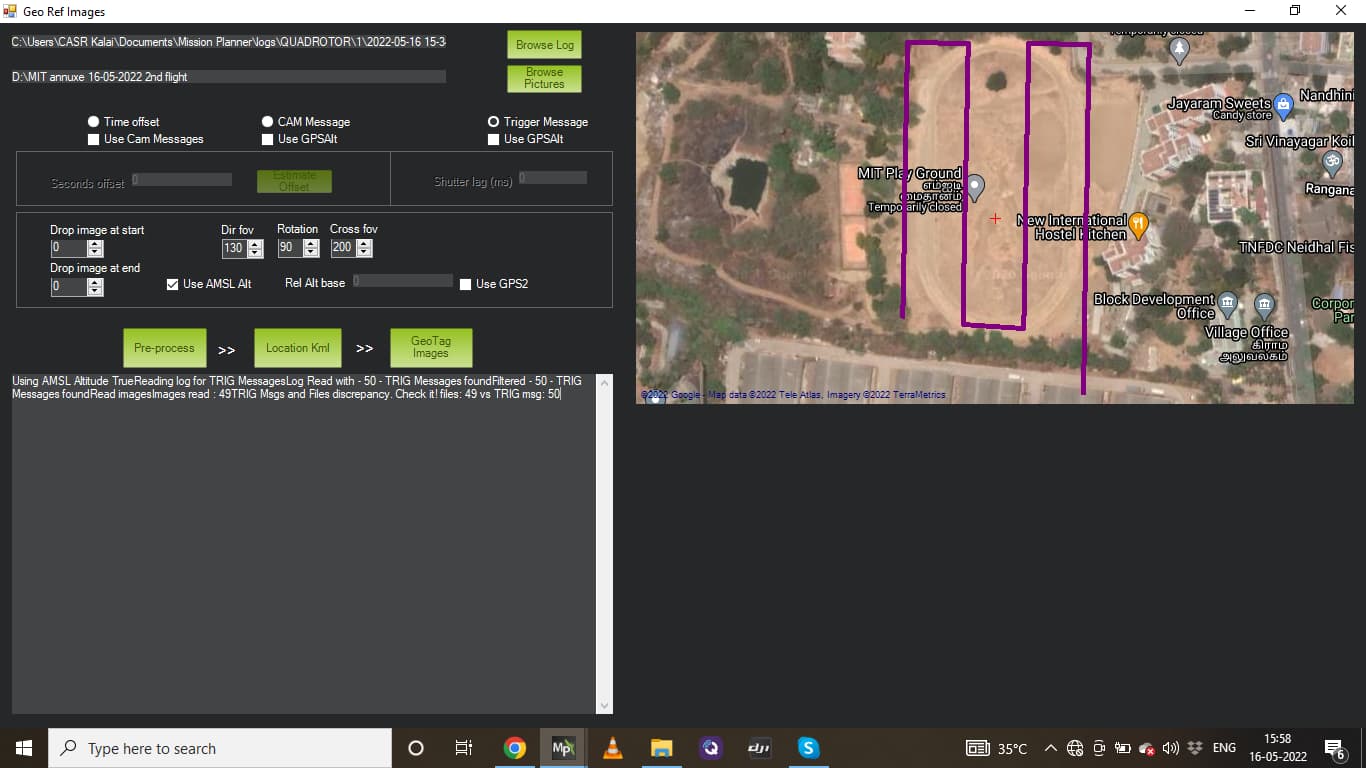
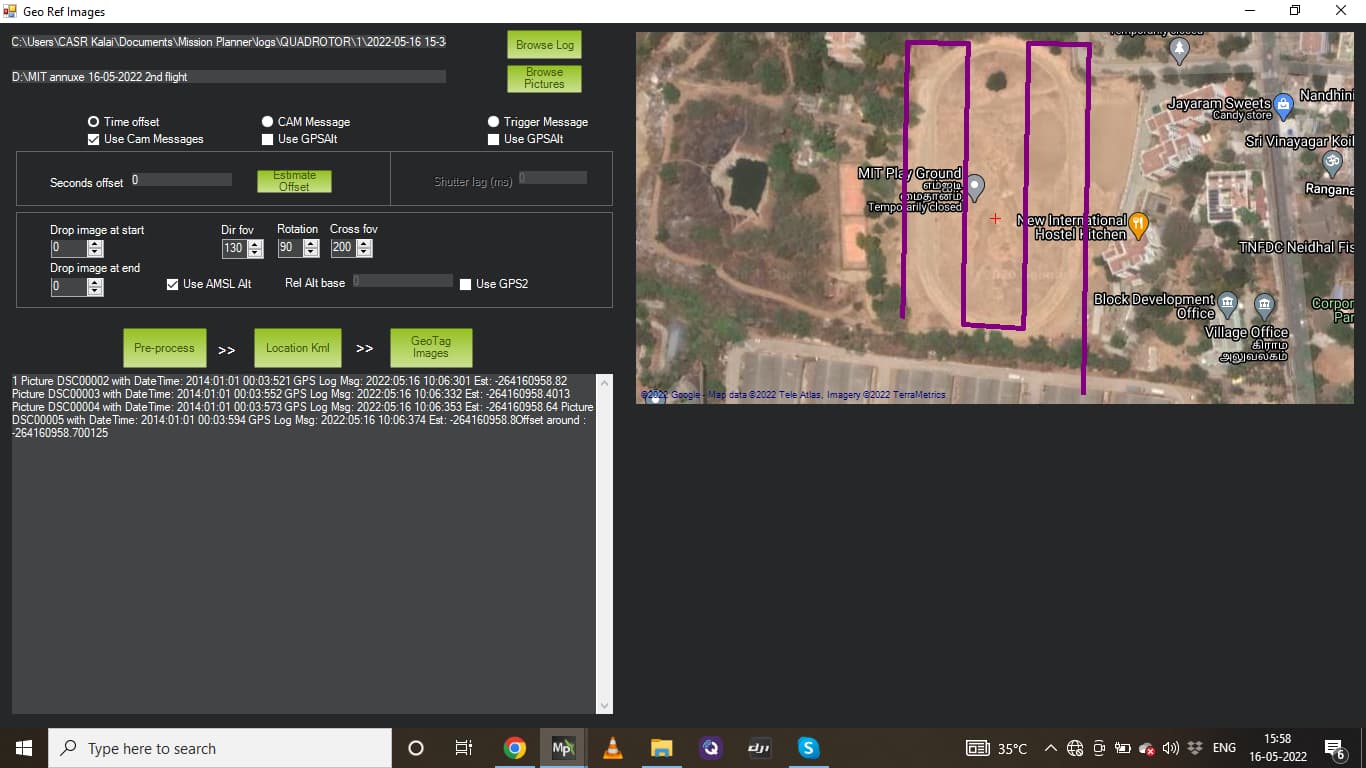
@Michael_Oborne today i had two flight in which only changed is SD card of the camera which is Higher writing speed than previous.
both flight got 100% match images with FC messages while i choose CAM Messages option. But when i choose Trigger message again Trigger information shows higher than images.
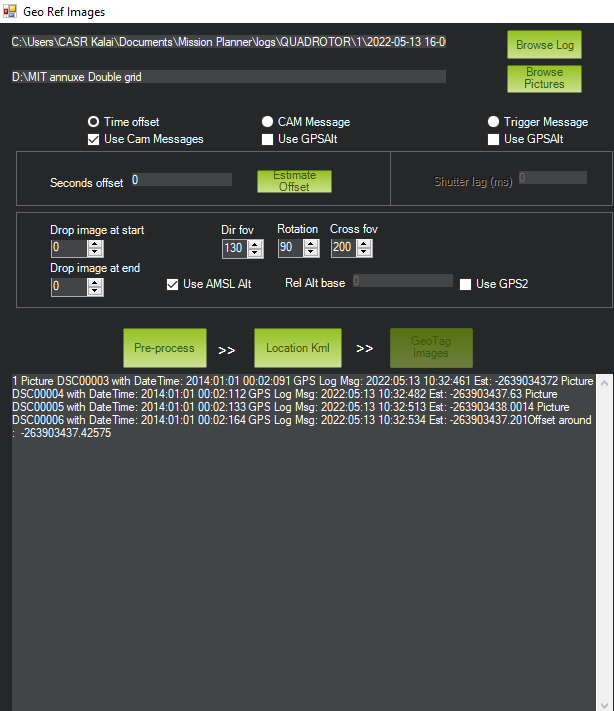
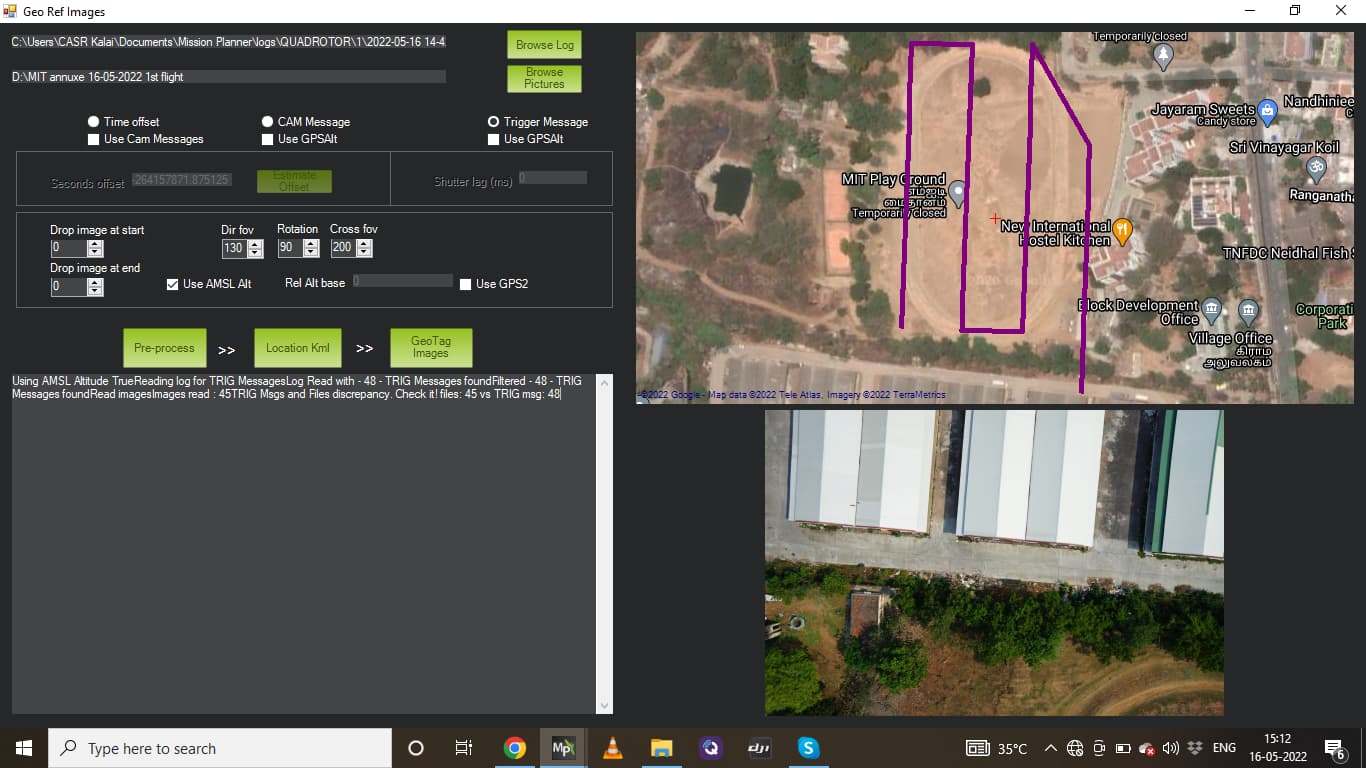
then tried 3rd option time offset method to clarify but here also geo coordinates look like separated unequal area and distance. I have attached the screenshots here .
Using Time offset Method:
but this time using time offset method some how look like aligned properly i don’t know why. nothing difference from 1st and 2nd flight.
I’ve been through much of these issues with my Sony RX0ii and Seagull #REC2 shutter controller.
Here’s a couple of things I’ve learned from my experience:
The Mission Planner auto-waypoint “survey grid” feature puts a DO_SET_CAM_TRIGG_DIST waypoint at the beginning and end of each row. I got better results when I removed all of these except the first and last - to start and end the camera taking photos as it enters and leaves the grid. This results in extra images at the turn-arounds - which isn’t a problem for me - it just builds a slightly bigger model.
I use Pix4D which will either read the geotag from each image, or accept the images without the geotags - and allow that information to be provided from a separate CSV file. The Mission Planner geotagging function produces this CSV file along with the new directory with copies of the original image files with the geotags added to the EXIF in each image file.
When there’s a mismatch of CAM messages to files, it may be easier to edit the CSV file directly. If there are too few image files - simply duplicate enough of them at the beginning or end to allow the geotag function to work. The in my case, Pix4D allows me to see where the photos and geotags are out of sync - it’s easy enough to edit rows as appropriate in the CSV geotag file to get the best results.
Unless you’re doing RTK/PPK geotagging - your photogrammetry software may not need perfect geotag matches. In my case, Pix4D will build a model with no geotags at all - and will still build a measurable model if quite a few images show they are calibrated in very different positions than their geotag. So it may be possible that you don’t need a perfect geotag match for every image.
My Sony RX0ii can handle image frequency of close to 1 image per second. I expect the FoxTech Map-02 can as well. But it’s important to have a high quality (expensive) SD card, and I always re-format it before every mission.
If unknownly either front or end duplicating is major problem for the other images for Geo tagging and cause large position shift also cause whole data might wrong.
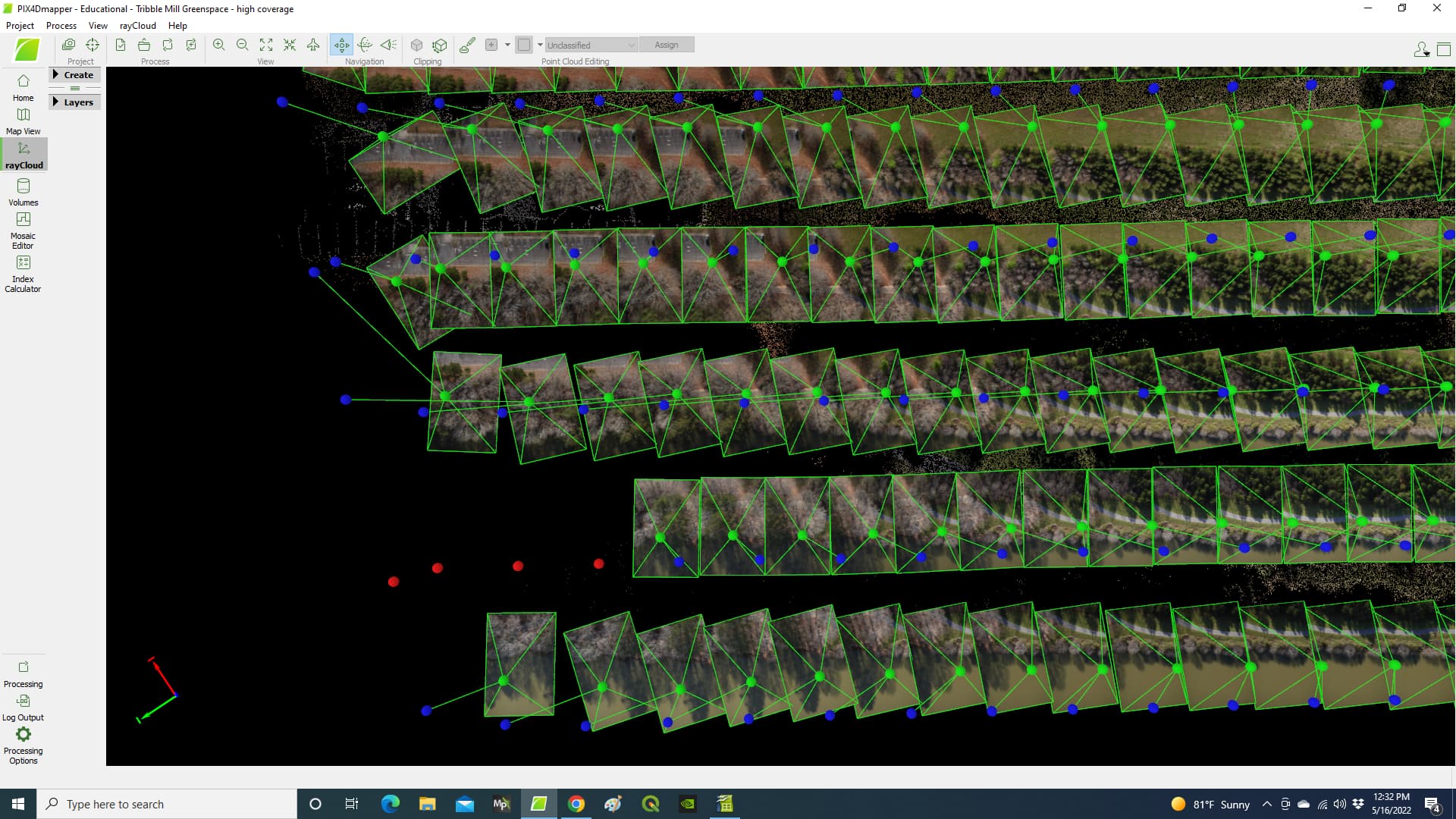
The best way to visualize the geotag situation is to load the images into software such as Pix4D that will “calibrate” the images. Consider this image from Pix4D:
In this image the BLUE dots represent the coordinates of the image from the geotag. The GREEN dot represents where Pix4D has “calibrated” where the image really is - based on how it fits together with the adjacent images.
As you can see - in many cases the distance between the BLUE dot and the GREEN dot is quite close. But in a few cases the distance is quite great. Pix4D is smart enough to sort out the discrepancy.
No doubt - it’s best to have the BLUE dots and GREEN dots to align perfectly.
Sometimes it’s possible to tell when an image has the geotag from a photo that doesn’t exist. In this case, editing the geotag CSV file is an easy way to assign the right geotag with the right image.
Also note in the image I’ve included - RED dots. The RED dots represent geotags of images that could not be used because they did not fit (matched) with the surrounding images.
I suggest you do a “rough draft” of the geotag by simply using the option to eliminate some of the images from the beginning or ending of the series. Then process the images with your software as I have shown here in Pix4D so you can visualize what’s happening.