Hello,
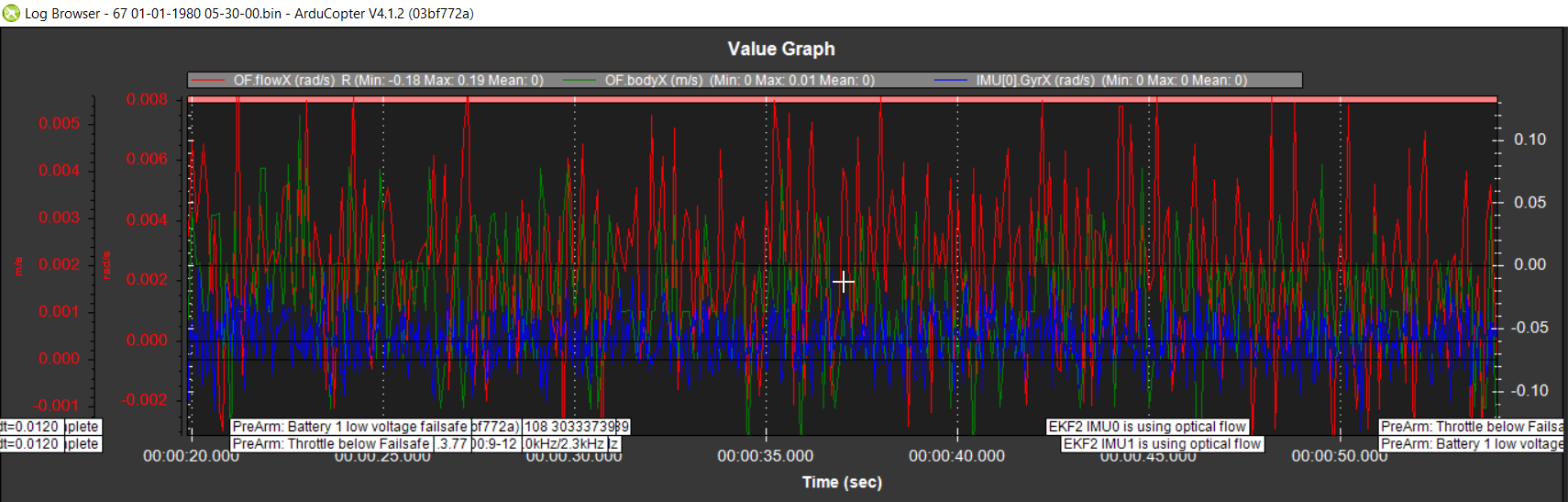
I am trying to calibrate PX4flow sensor. But when i plot OF.flowX, OF.bodyX and IMU.GyrX, they do not overlap or co relate. I have tried the ‘FLOW_FYSCALER’ parameter but it did not help. The rangefinder TFMini is showing correct readings. The camera is focused and the mounting offset which is -7cm in Y and +7cm in X from the flight controller is also given. I have tried with different floor and lighting conditions. Any suggestions?
Log File: WeTransfer - Send Large Files & Share Photos Online - Up to 2GB Free
Thanks