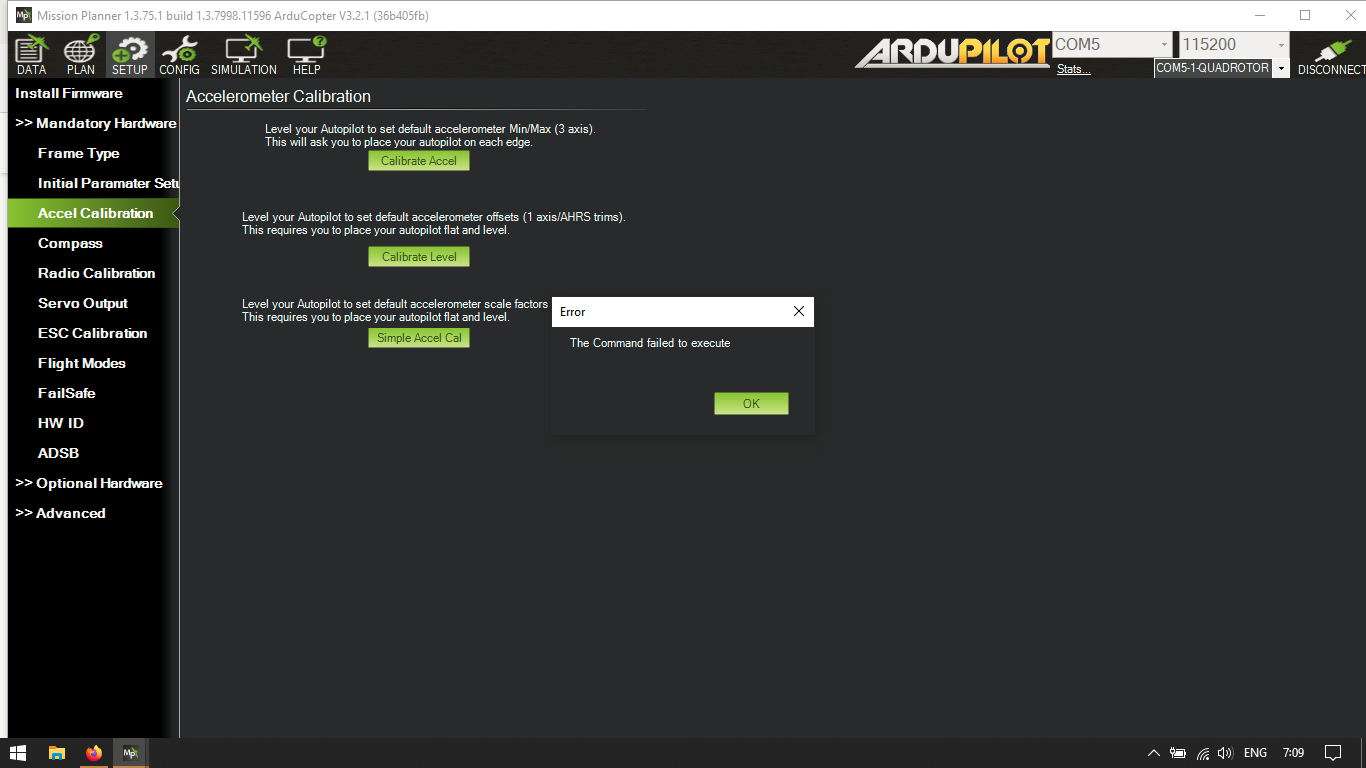
I keep having troubles to calibrate level of my plane in initial setup tab. Once i setup level of the plane and hit the button i keep having an error "Calibrate Level Error: The Command Failed to Execute”.
It happens all the time regardless of plane being armed or not.
I did calibrate accelerometer right before but it does not help.
I’m connecting plane to pc via USB cable
I’ve found this can be due to a max angle error. For example, my controller was mounted at a 15degree roll offset, and I got the same error. When I leveled it better (<< 15deg), the level command worked.
@Maciek_S Did you get this to work? I am having the exact same problem with my Matek H743-slim running the latest Arducopter build, latest Mission Planner.
The accelerometer calibration succeeds after it goes through the several steps required (turn FC on the left side, right side, etc), but the level calibration continues to fail with the message: “The Command Failed to Execute”.
Here are the messages I see in the Messages tab afterwards:
Thanks @Allister. Yes, I have connected a BN-880 GPS+compass as well. I am acquiring satellites, and the compass heading shows up in MP, but the Level calibration continues to fail with the same unhelpful error message: “Command Failed to Execute”.
Looks like pretty much everything else in the “Mandatory Hardware” section in MP can be configured with a bit of patience, but the Level calibration doesn’t work.
The FC is lying flat on the workbench with the peripherals connected during this operation, and everything is standing still with no vibrations, no movement.
This is truly puzzling to me. I have a lot of experience with KISS, BetaFlight, and CleanFlight before that. This calibration step was always a quick click for me in KISS/BF/CF, and it always succeeded. I am not sure under what circumstances it can ever fail??? Is it a matter of writing some data back to the FC via MAVLink, and that’s possibly failing? (BF/KISS/CF do not use MavLink for communication with the FC afaik).
Is there some log where I can do some digging and see if there are any relevant/useful error messages that may help elucidate this mystery?
It took me a while to put everything together so I could answer these questions. Yes, they are pointing in the right direction. The compass is integrated into the Beitian BN-880 GPS unit, and it’s aligned with the direction of the FC, which is pointing forward. When I move the quad, both of them move at the same time and the resulting direction lines in Mission Planner point the same way. Yet the “level calibration” always results in an error: “The Command Failed to Execute”.
Could it be that under Config, Full Parameter list, AHRS_ORIENTATION was set wrong? I set that parameter back to 0 (none) and then I was able to Calibrate level on my Matek F405 Wing.
No, unfortunately not in general. I worked once or two but it was after 1000 of reflashes etc. so cannot really tell what worked out. Now, when I switched to another plane i keep having similar issue - cannot calibrate the level.
Just ran into the same issue today while calibrating a small (<1kg) simple FPV plane with GPS but no compass; I’m running Plane 4.1.2 and the FC is an omnibus F4 Pro V2.
The FC is installed Yaw’ed (if that’s word) 270deg (AHRS_ORIENTATION = 6) and not super flat from a Roll perspective.
Similar to you I was getting the message “The Command Failed to Execute” while trying to calibrate. The calibration was working on the bench a couple of weeks ago.
I’ve updated Mission Planner to “Beta Updates” - v1.3.75.1 - and now ‘Calibrate Level’ works; also there’s a new ‘Simple Accel Cal’ option that also works.
Hello friends. I have a message after every shutdown: PreArm Gyros not calibrated. I calibrate Matek H743-SLIM V3 turned off, turned on and again Gyros not calibrated. what is wrong with this controller? there was no such thing on pixhawk. I tried old firmware versions and new ones.
needs at least AP4.2 or newer. There was a hardware change of the IMU. The older versions of ArduPilot (like 4.0 or 4.1) don’t have the newer IMU (gyro) sensor installed.