I’m new to using DataFlash logs, I could use a little help 
Log File C:\Users\jimpi\AppData\Local\Temp\tmpFA6A.tmp.log
Size (kb) 1408.0205078125
No of lines 17887
Duration 0:00:51
Vehicletype ArduCopter
Firmware Version V4.0.3
Firmware Hash ffd08628
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (1.97%)
Test: Dupe Log Data = GOOD -
Test: Empty = FAIL - Empty log? Throttle never above 20%
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.09, WARN: 0.75, FAIL: 1.50)
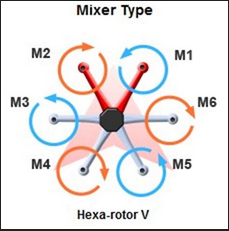
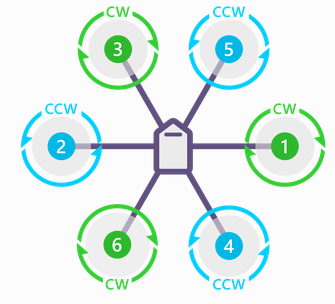
Test: Motor Balance = GOOD - Motor channel averages = [1305, 1279, 1284, 1298, 1292, 1287]
Average motor output = 1290
Difference between min and max motor averages = 26
Test: NaNs = FAIL - Found NaN in CTUN.TAlt
Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = GOOD -
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data