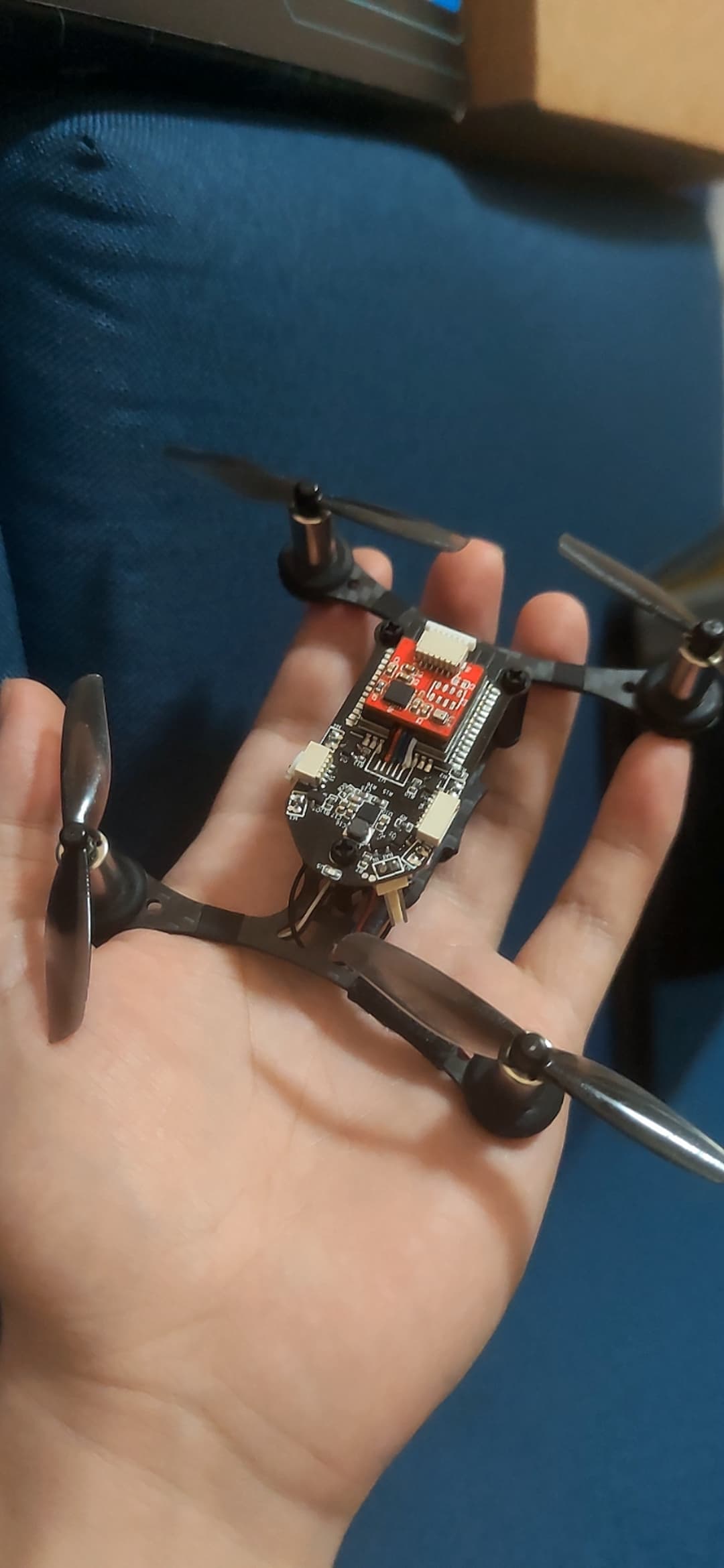
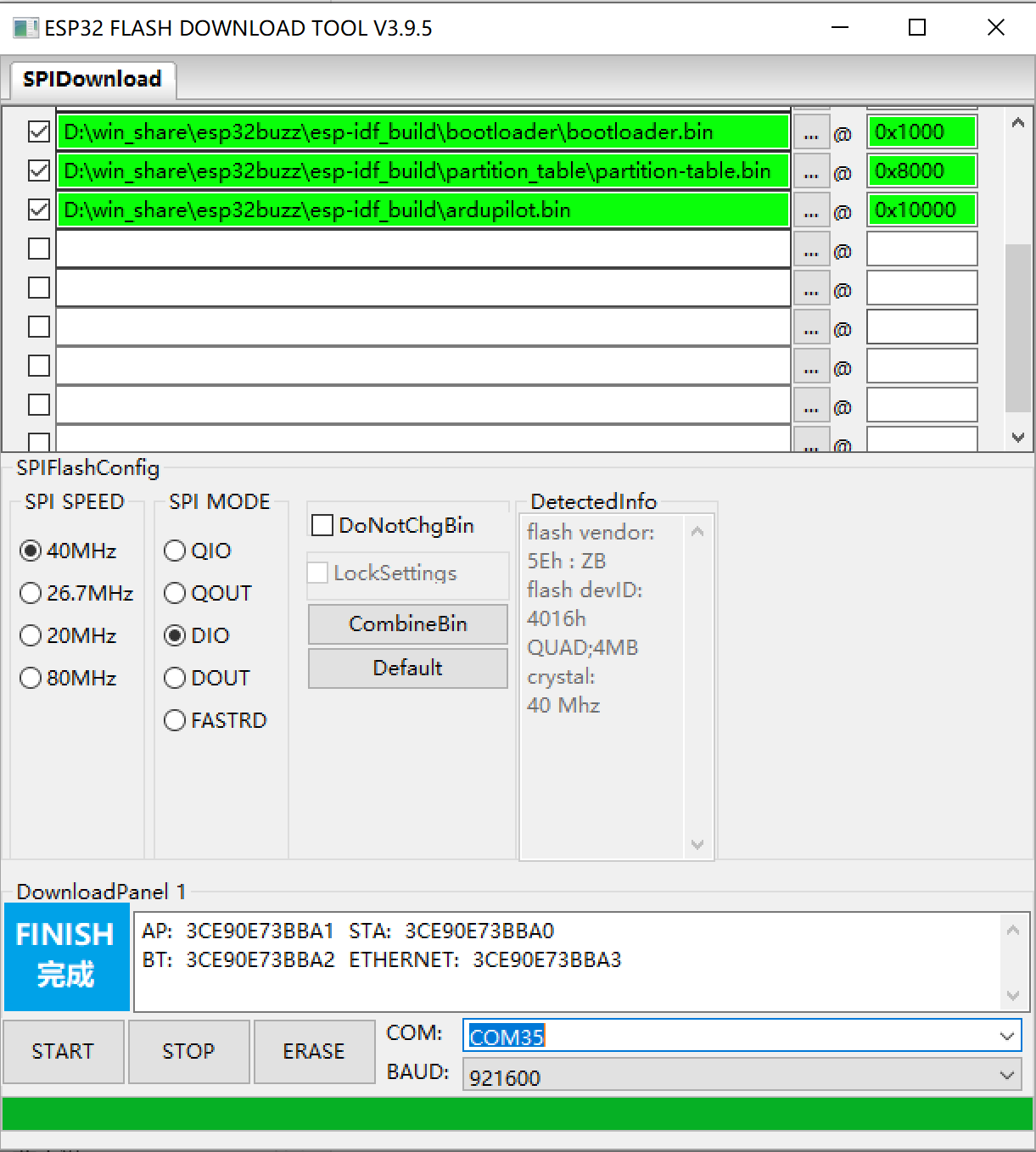
ESP32 is a very good mcu, and i really want to use it to build a mini drone(i call it firefly), so i try my best to work it out, now it come ture, i was even more pleased to find out that the ardupilot has started to support the ESP32, so i porting ardupilot to my drone, and i have done it, and it is work so well:
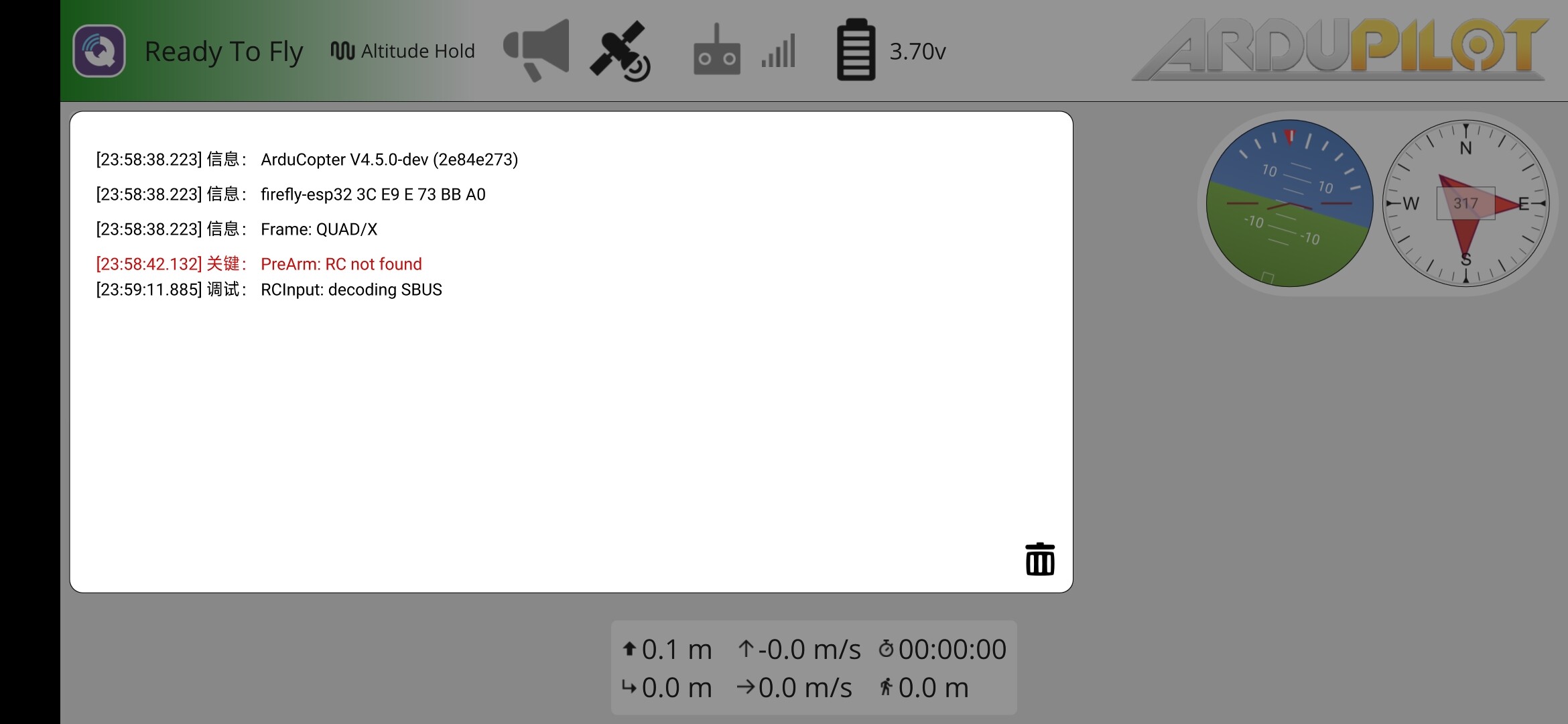
1、Althold mode testing video:firefly atlhold mode test.
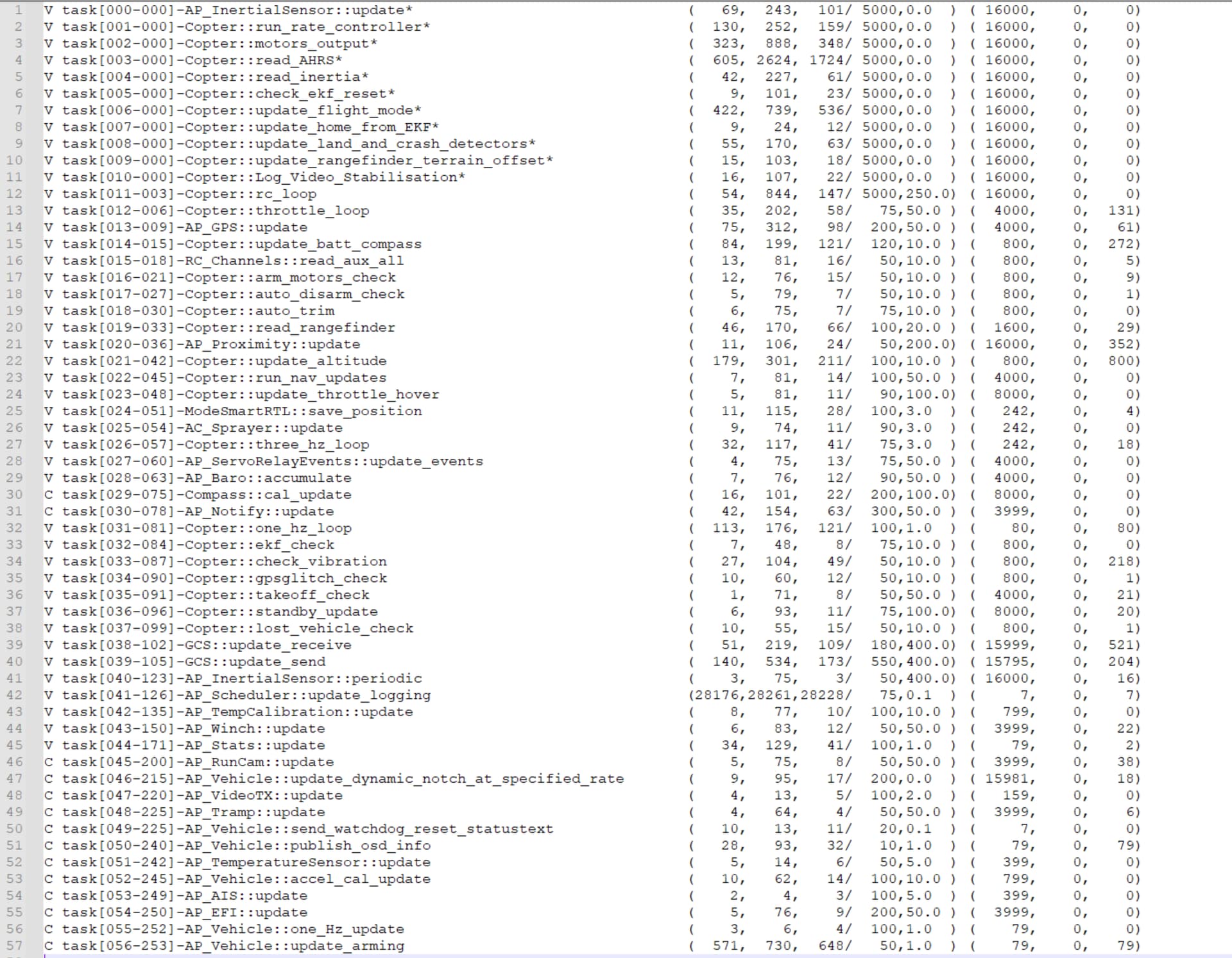
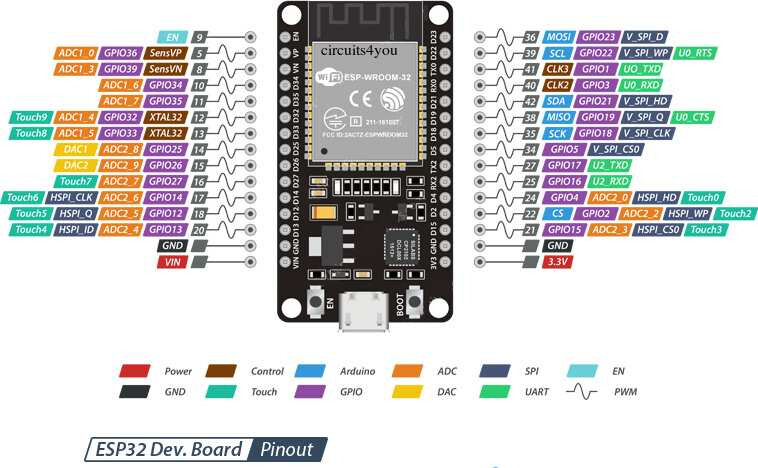
@Alberto_Ds, I use esp32_wroom_32 module, mpu6050 and spl06(or ms5611) on i2c bus, i run the scheduler in 200hz, and do some optimize for the code, but it seem still some timeout to run the tasks:
1.
@Alberto_Ds
1.I design the IMU module and the controller board myself, and I build my HW before found the Ardupilot is already support for ESP32, so I need to do some porting for my board.
2.I guess maybe it can’t run well if you use the natively support for ESP32 without some optimize.