So.
All calibrated and configured according to the manual.
Althold works perfectly.
Loiter - perfect.
Flight by waypoints - perfect.
Changing the height as in a big way and in the smaller in guided mode - perfect.
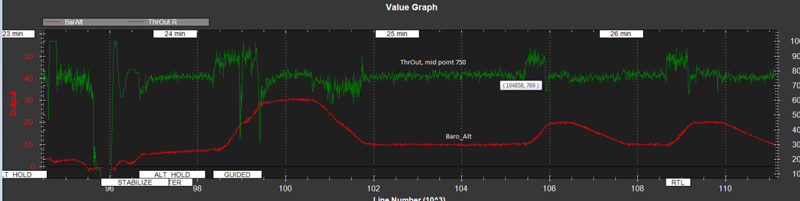
Here’s an example graph reduction and climb, guided:
Red line - baro
Green - ThrOut
This chart everything is fine, when we collect height - just added Thr when reduce height - slightly reduced Thr.
Now the problem:
When I turn on RTL mode home copter arrives at the point perfectly, but with a progressive decline is fast and he hit the ground at high speed. Parameter Land speed and Speed Dn has no effect on the rate of descent.
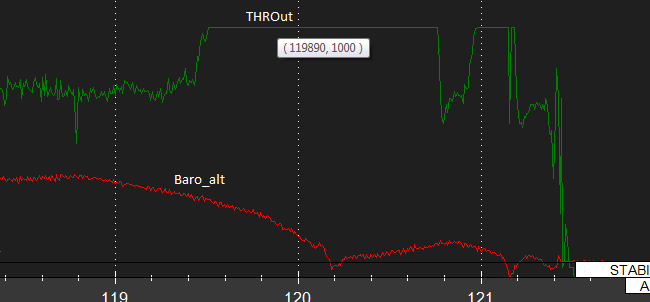
But the strangest thing we see when we open graphics:
At the beginning of the decline, on the graph shows that the percentage of gas becomes 100%, then starts falling copter on the ground. But in the real gas is not 100%. And it is not connected to the battery, or with something else! This can be seen in the attached log file.
Links to files:
log from flash APMhttps://drive.google.com/file/d/0Bz7MnAVHtFBpdFVnSmwwc3ZwT0U/edit?usp=sharing
params: https://drive.google.com/file/d/0Bz7MnAVHtFBpYXlmdG5IWkNFN3c/edit?usp=sharing
Firmware: 3.1.1 and 3.1.2rc2
Setup of copter:
sunnysky x4108s, 17inch carbon prop, maxamp 3s 2pcs 11000mAh, AfroESC 30A, quadropixel frame, origial APM.


