Im using the RTK/GPS inject feature with a swiftnav piksi broadcasting it’s observations through UDP. In mission planner. when I try to inject the GPS by connecting to the UDP host in the correct port, Mission planner freezes for a while and then crashes. The fix to this issue was to uncheck ‘New RCTM msg’ and to also uncheck ‘M8P config’. I do not know why this happens, but thought it’d be worth reporting.
Also, Once I unchek both those options, when I connect to the UDP host, the window to enter port number and the window that says connecting appear twice. This is not a big issue though.
my guess is the issue is the m8p config option.
as that trys to write to the port/udp. which just fails as the piksi system isn’t listening at a guess.
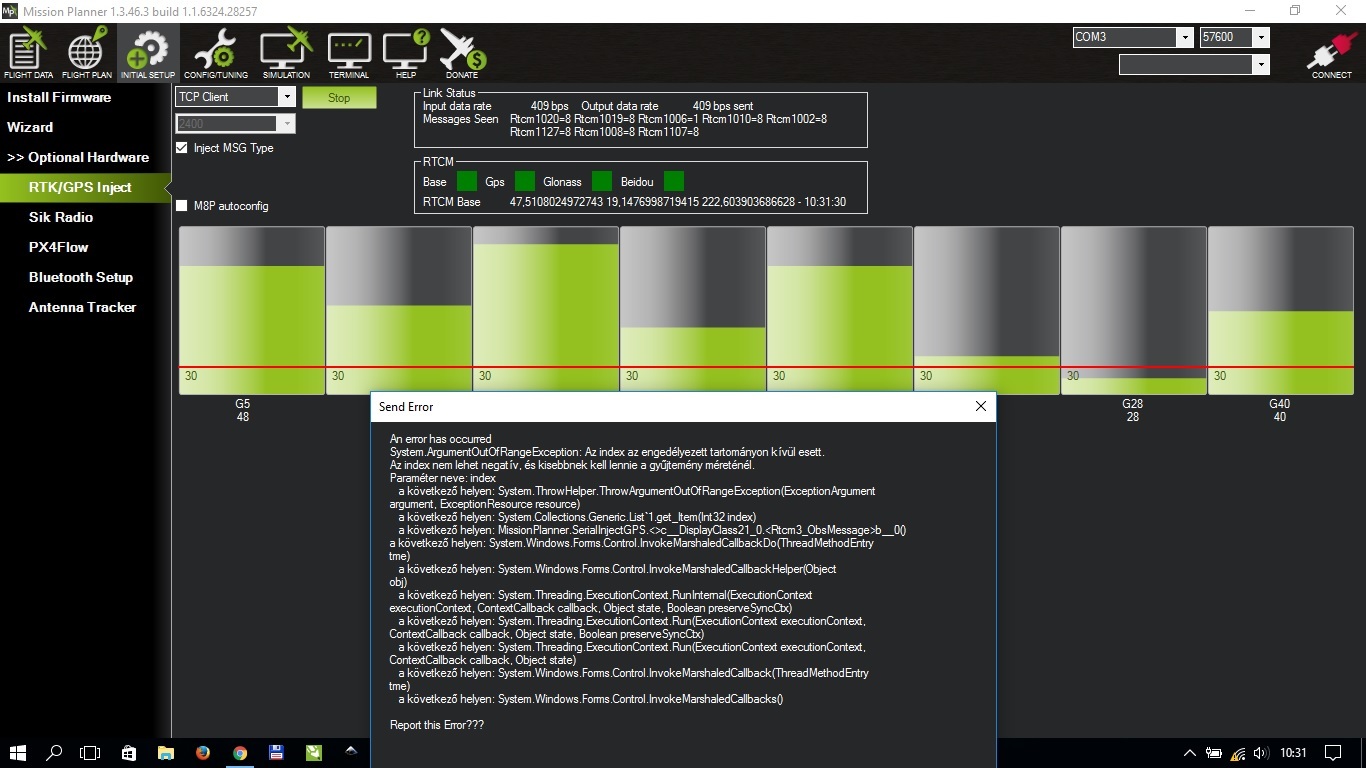
Reopening of an older topic but my issue is a little bit similar with RTK inject in MP 1.3.46.3. I tried to connect my Emlid Reach base as a TCP server-client and after connecting MP sees incoming messages from base but immediately after first data package I get this error message:
It states (in Hungarian unfortunately so I’m trying to translate) that an index is out of range, index can not be negative value and has to be less than the size of data collection/repository. If I close pop-up window, I get back message immediately.
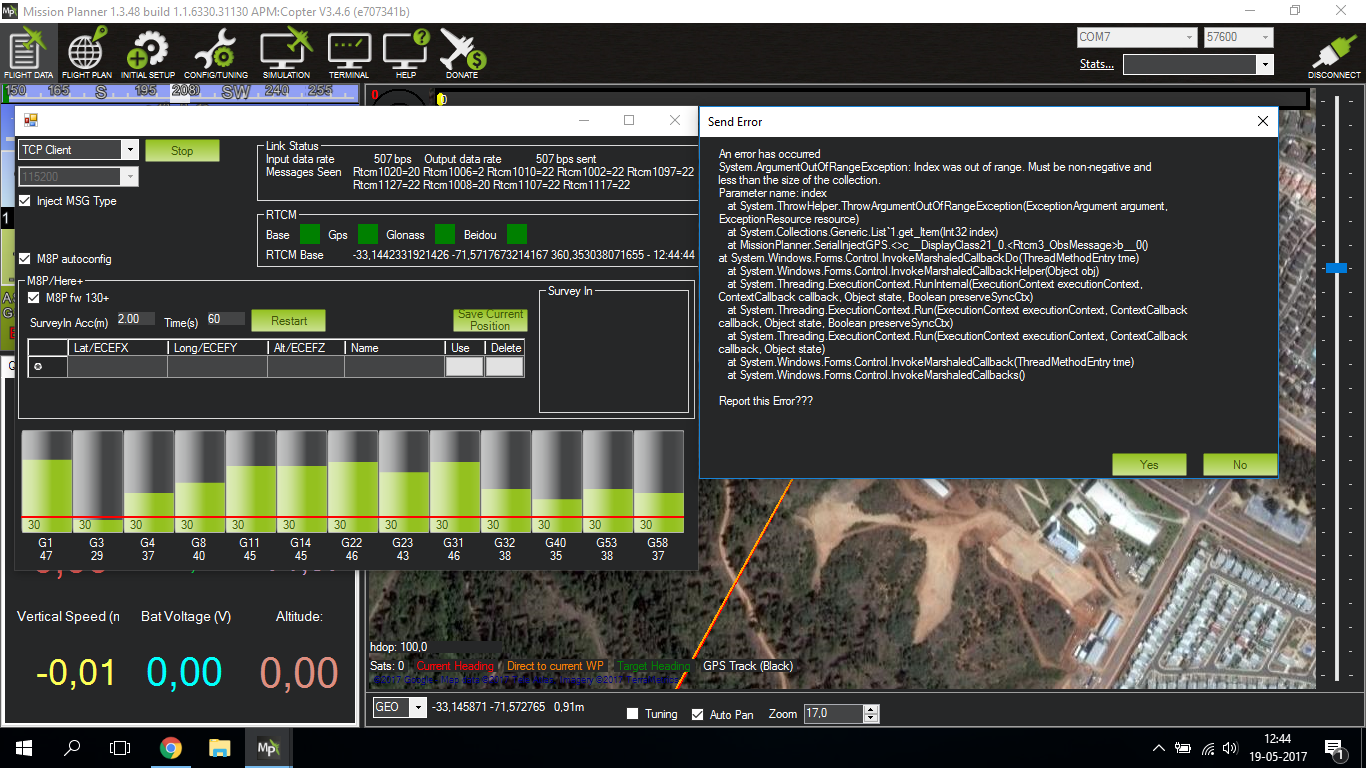
I have the exact same problem. I’m using an Emlid Reach RTK as base (an another mounted on my drone) and as soon as I try to inject GPS from the base via TCP I get that error.