dear @fs007, @rmackay9
i can only Comment it from the practical “in the field” side
This terrain following is in my eyes perfekt. Recently, I had to fly / do measurements at the top of a hill. I couldn’t use the Range Finder because theire were too many “winter” Trees (without Leaves) underneath.
So I went for the Google maps Data and the copter holds exactly 60 m above Terrain Level as wanted. I saw the Baro Measure was changing between 60 and 40 meters (no wind day!) and that was exactly the altitude difference from the Map Data.
When I fly in low altitudes + 2m with the Rangefinder above flat terrain, grass, or even fields the range finder Terrain following works perfect.
The only Situation, which I could complain a little bit is when Im flying my big Bird (8 x 18inch Props, TOW 12KG ) as low as 1 meter above the Ground on a gusty wind day.
Normally, without the wind, he follows the Terrain ±20cm. Even when you think about that their is a Problem with the ground effect i cant confirm that I think Im flying always in Front of the Ground effect.
But then, when their ist this gusty wind, the Problems are starting. You see the Copter jumping caused of the influence of the Baro.
At that Moment Im just wishing to have a knob of turning off the Baro and fly 100% with the RNGFND, or to have a manual mixing of Baro & Rngfnd or something like that.
But honestly, compared to the history of Altitude Hold in the past, in my eyes it is enormous where we are these Days…
2.nd But, but theire is always room for Improvement
I think the current terrain following in pilot controlled modes (like Loiter) works pretty much as you describe. It will only follow the terrain if the rangefinder is in range and this range can be set using the RNGFND1_MAX_CM.
This is all done without adjusting any parameters within the EKF - the EKF doesn’t use the range finder as it’s altitude source.
@rmackay9
So, If im changing EK2_ALT_M_NSE IT doesnt make any different to the use of the Range Finder, or? I thought that that would maybe be a possibility to give the Range finder more strenght
I have not specifically tested the EK2_ALT_M_NSE parameter when the EK2_ALT_SOURCE = 1 (i.e. rangefinder) but I strongly suspect that it will control the balance between accelerometers and range finder.
At the risk of sounding like a parrot, I’ll just re-iterate once again that the EKF’s altitude source doesn’t need to be changed in order to accomplish terrain following which is what the vast majority of users want. The EKF’s altitude source should only be changed to range finder for indoor use with a flat floor.
@rmackay9
Thanks again for ure estimation of the situation. As I discribted above that system as you recommend is very precious.
It is just that I try to find a way to use stronger the rangefinder to get the terrain follow altitude more precise when I’m flying close to the ground.
So, if theire is any Idea I would really apriciate it.
Increasing the RNGFND_GAIN parameter should increase how aggressively it tries to maintain the desired height. If you have a dataflash log I can take a look.
There are some things we can do to improve performance including adding support for multi-beam lidar or allow multiple lidar (pointed in slightly different directions) to be used.
@rmackay9
Thank you very much.
I played around with the RNGFND_GAIN alot, even I put it these days at Channel 6 Tuning_41 so I can adjust it quickly with the remote depending on the surface im flying.
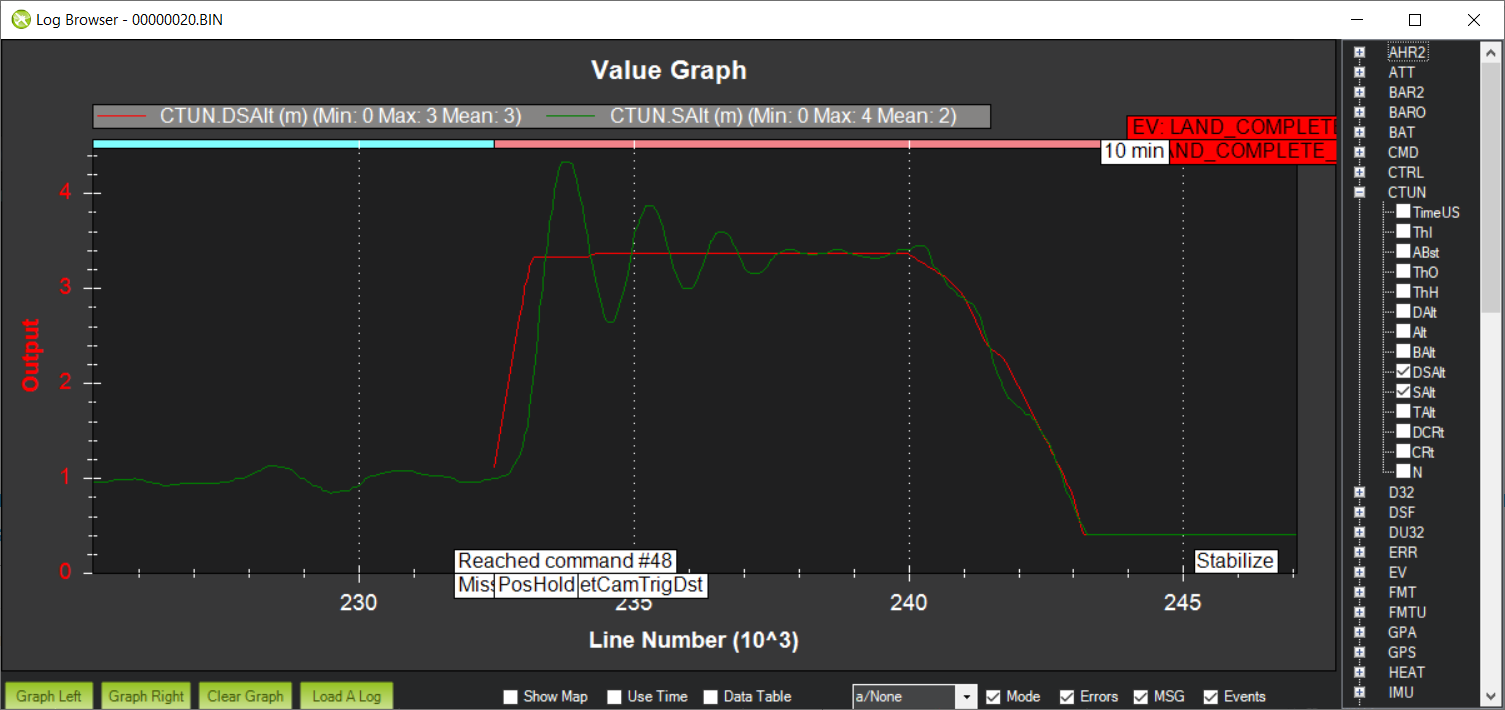
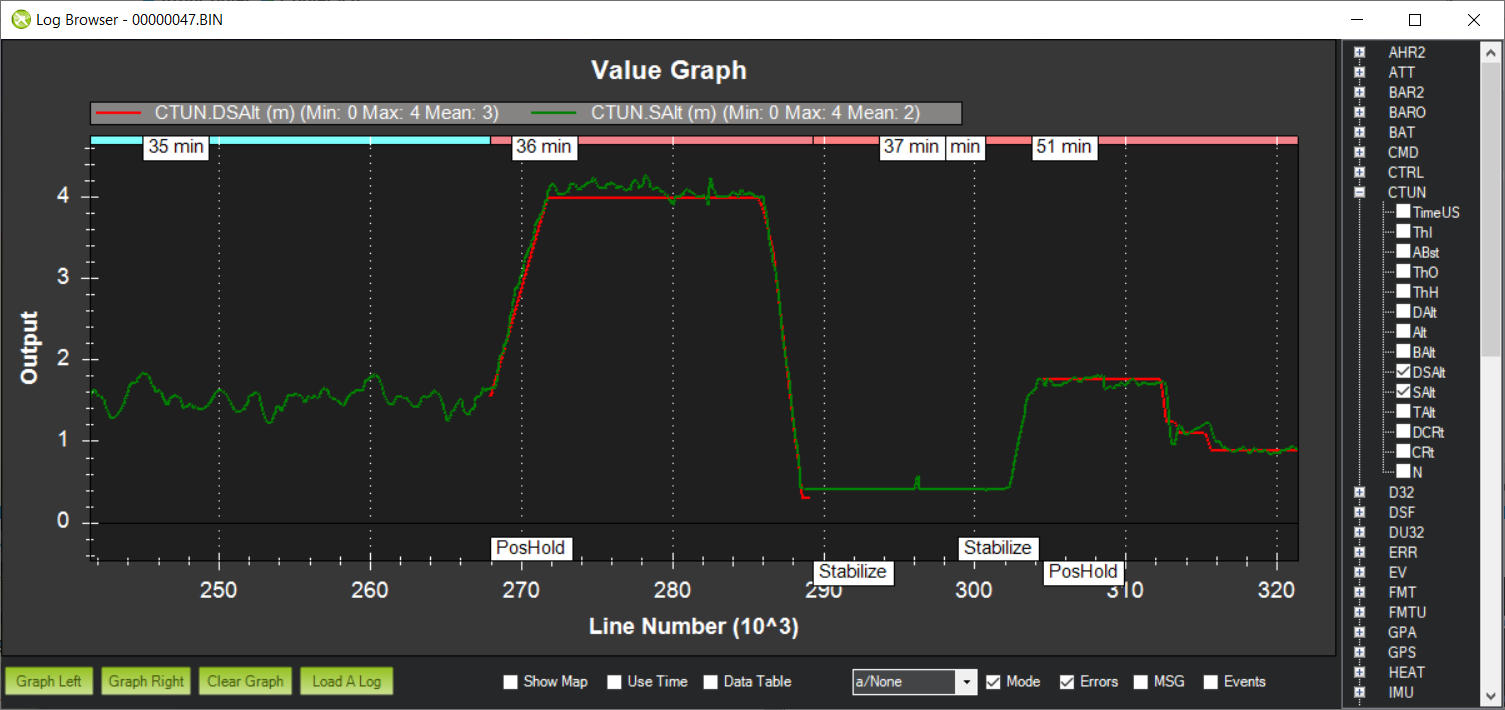
#20 was on a no wind day. The copter was doing a good job, although theire has been the situation where he comes scary close to the ground. #47 was on a gusty wind day. he was jumping up and down quite bad and came very close to the ground so the second fly I adjust the altitude to 1.5m
I like the Idea of using multiple lidar, maybe the system would recognize then also a little bit earlier a change of the terrain altitude then now, when i have to fly on very complicate terrains very slow with all the disadvantages of slow and close to the ground flying ( downwash & Baro etc)
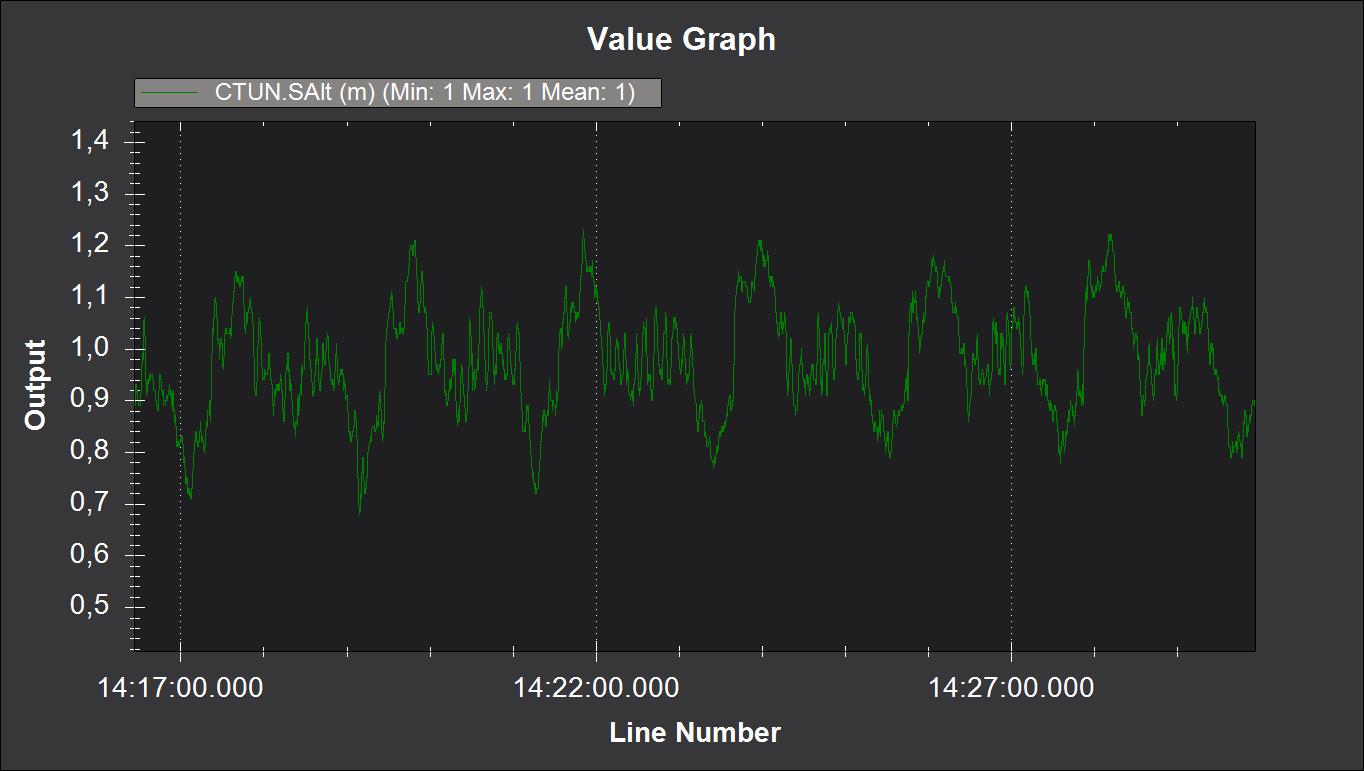
In the #20 log, the RNGFND_GAIN is set to 1.7 (the default is 0.8) which is too high and results in oscillations. Below is a graph of the desired sonar altitude (CTUN.DSAlt) vs the actual sonar altitude (CTUN.SAlt).
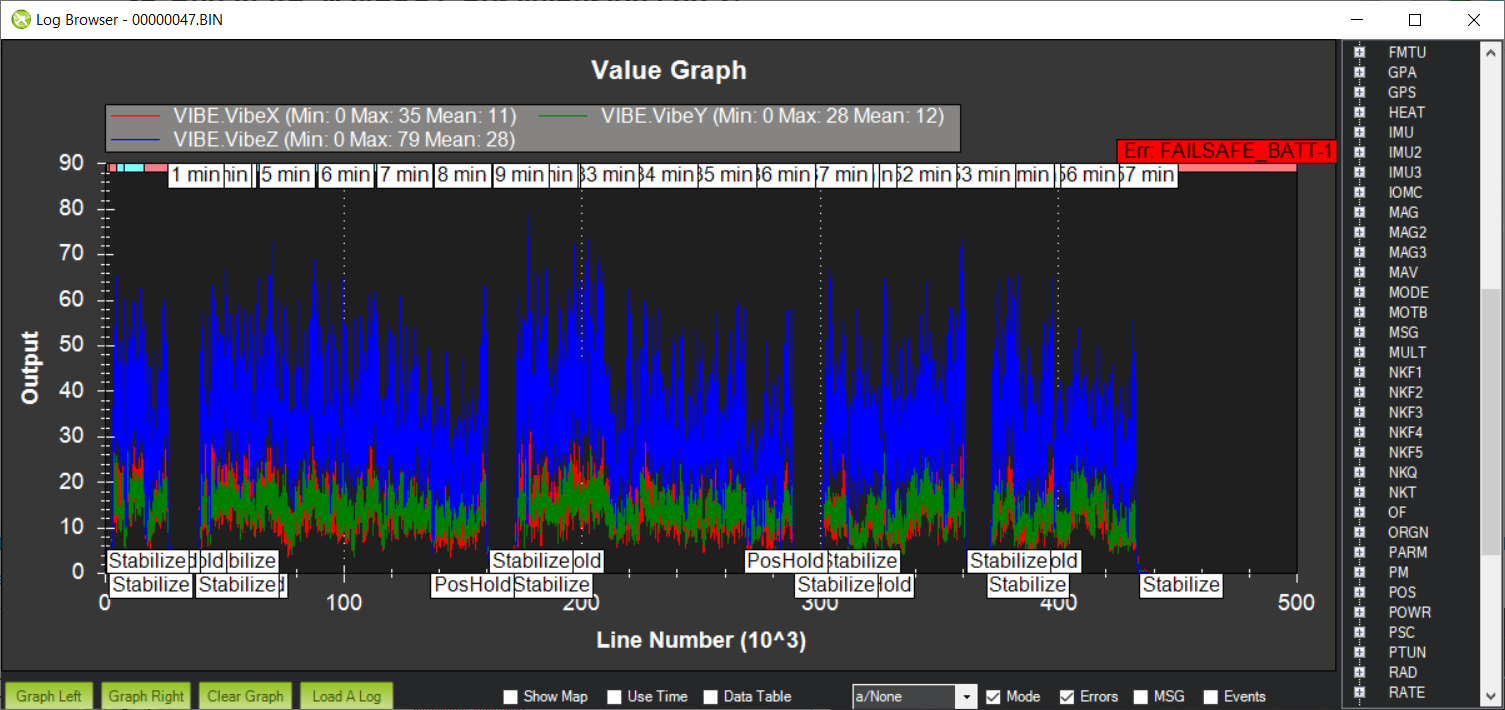
One issue though is the Z-axis (i…e vertical) vibration levels are too high. In general vibration levels should be below 30m/s/s. This log shows values that are very often above this so some improved vibration isolation should help.
@rmackay9
thanks alot for having a close Look at my Logs.
thats very interesting to look at CTUN.DSAlt and CTUN.SAlt. Everyday you can learn a new Thing. In the End with this Graphs and with putting the RNGFND_GAIN on Channel 6 I can adjust the best settings. Thanks.
The Problem with the Z-axis I do know. Even during the Flight I can see in the Mission Planner that VIBE is turning to red sometimes.
Unfortunately I didnt found a Solution to get that Problem solved.
I´m using the, in my eyes, very handy @proficnc Kore Carrier Board which is absolutely perfect for building Copters. But I didn’t found a System yet to get the Vibrations reduce. At the Moment I put the Board on Rubber VIBRATION DAMPERS M3X15 which seems not to be enough
By the End of January I´m gonna be back in Germany after staying in Australia for a month working.
I´m thinking of building something with O-Rings which is recommended on the https://ardupilot.org/copter/docs/common-vibration-damping.html
I hope that that gonna help
The RngFnd_Gain I increased until 1.5
As we discussed with @rmackay9 earlier more don’t work. Then the Copter starts jumping up and down.
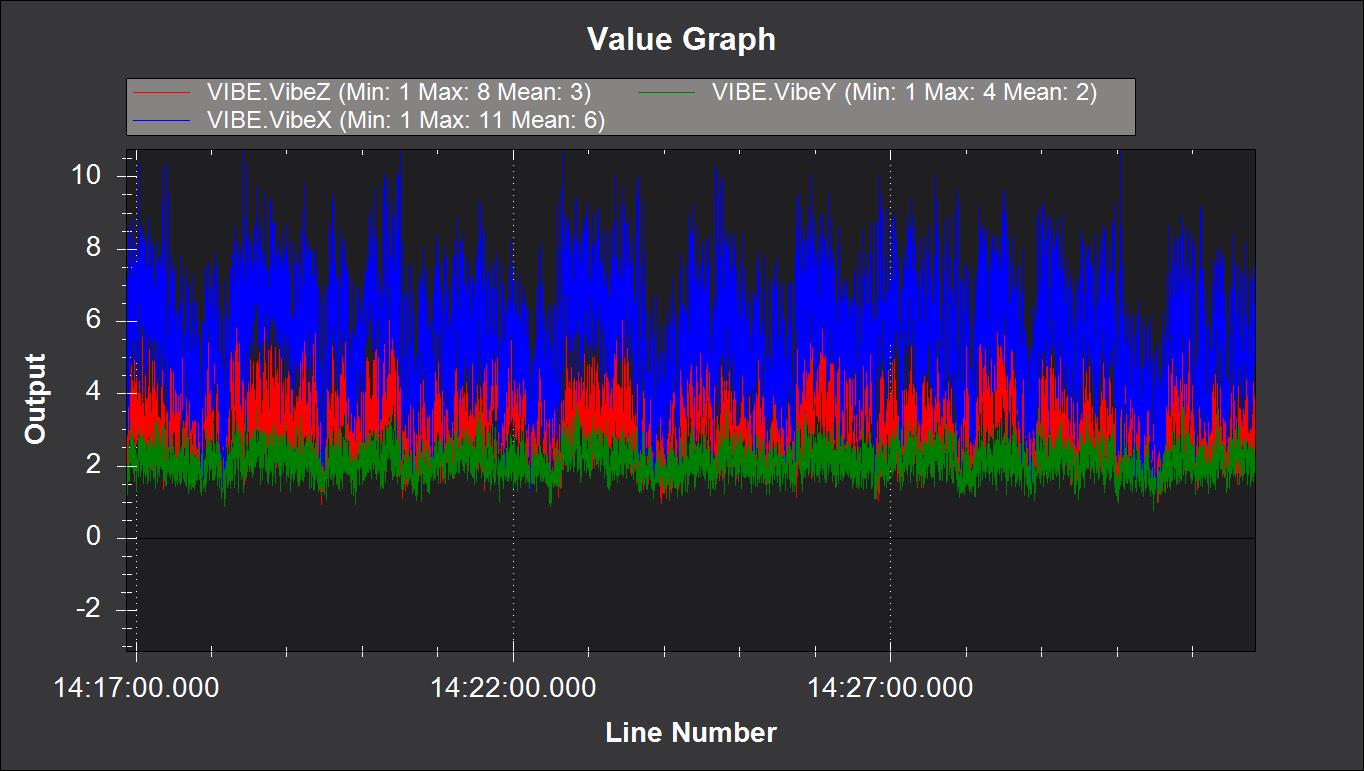
You think still alot of Vibes? I was so happy to reduce it from 60 to under 10 when until 30 is acceptable.
Then the next step would be to tune the filters…