Have a rover with motor controllers that need a relay signal to go into reverse. I’ve set the MOT_PWM_TYPE to 3, and can see the PWM signal at min at idle, and increasing in each direction, as expected.
So I need to set up the relay output, but getting lost here. Its a Matek H743 ver 3 FC.
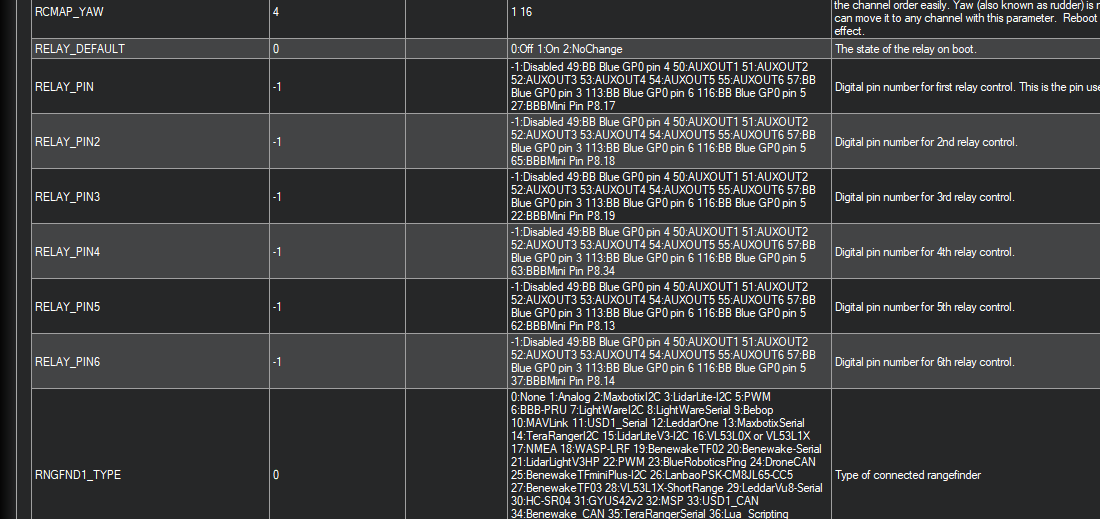
I’m using S2 and S3 for the PWM output, that works, and want to set up S4 and S5 for the relay signal, this is where I get stuck. How do I assign a relay output to a servo out pin?
In the docs it has categories for RELAY1_Parameters, RELAY2_Parameters, etc, but all I had on the Parameters List in Mission Planner was a section called RELAY, with very few options.
I suspect I’m in the wrong area.
Also, I noticed, even at minium PWM, its still generating a small PWM signal, enough to make the motors rotate slowly.
No need to reply unless its something you feel could help others ( I’m sure it will, the brushed motor with relay documentation is lacking ).
I’ve gone back to plan F. I’m using a ESP8266 to convert the RC PWM signal to a PWM 16kHz output and relay output to suit my motor driver. I was wanting to take this out of the system and use the FC “Brushed with relay” instead, but sometimes its just easier to use something you already have working.