I finally got my Rover working so it can be driven. However when releasing the throttle stick, the Rover coasts to a stop. What parameter needs to be set to get the braking functioning? I’m using a Traxxas Stampede with the XL-7 ESC. mRo Pixhawk 2.4.6 Essential Kit!
It’s very likely a setting in the ESC itself. Sometimes it’s a jumper and other times the ESC can be programmed either with a car or with a difficult-to-understand sequence of throttle positions. There’s a short section re this on the wiki here.
Thanks for the response. Maybe you can help me with another issue. I’m trying to set up MP to read the voltage of the battery without any success. What am I missing.
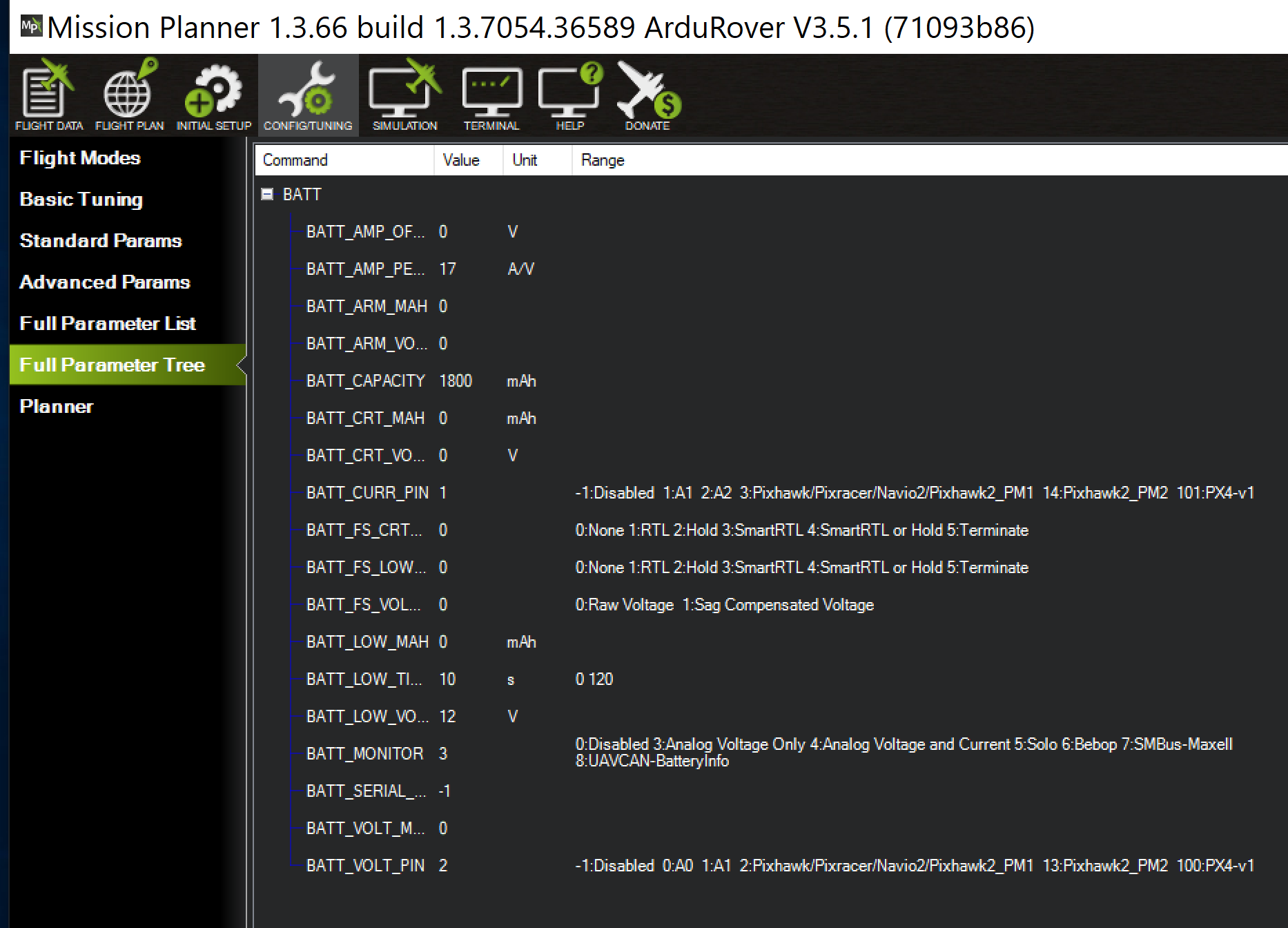

BATT_CURR_PIN should be 3 I think. Also BATT_VOLT_MULT and PIN may be wrong.
Did you try the set up for the power module in Mission Planner? VOLT_PIN should be 2 and BATT_VOLT_MULT 10.1 most likely. BATT_MONITOR 4.
1 Like
Dave,
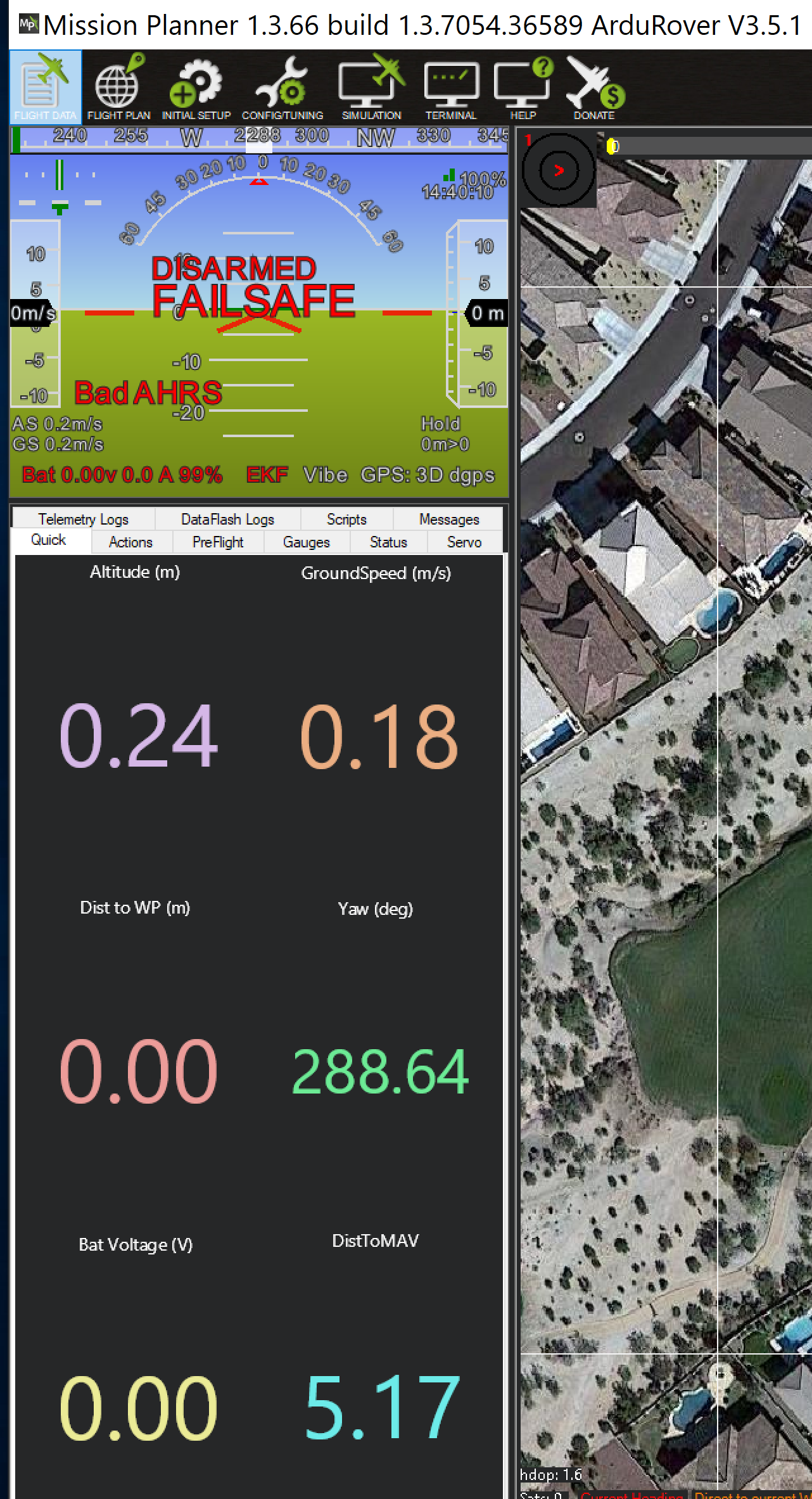
Thanks for the help, it got it working.
Chuck
2 Likes