Just started a new rover project! I wanted a differential thrust marine rover to play around with. Bought a cheap boogie board and two not-so-cheap Blue Robotics T200 thrusters.
Planning to put a 3s, 20Ah LiPo in it to do some long-range missions, maybe time lapses, who knows Mostly interested in 4G/LTE-based control and mission planning software.
Here’s my progress so far:
No auto mode yet, just running things in Manual. I still need to tune everything, but right now I only have a Mac laptop. Need to figure out the best ground station setup with my devices.
Looking great. I love how the boogie board boat frame has caught on. It struggles a bit with waves but it’s so fast and maneuverable and relatively easy to put together.
After several years dormant I’ve picked up this project again to play around with some sonar sensors. At the moment I just have a blue robotics single beam sonar on the bottom.
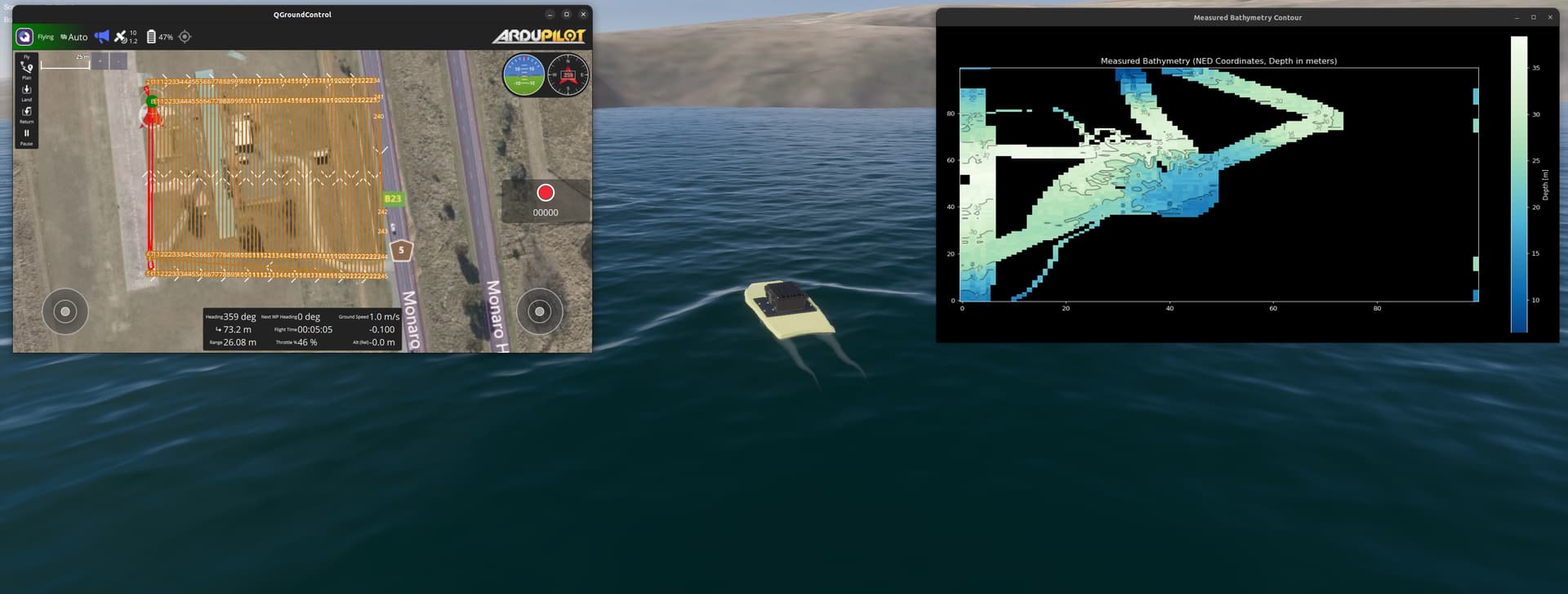
It’s still cold out, so I’ve built a cool realtime simulator in Unity that connects to Ardupilot SITL using the JSON API. I’m quite proud of the water buoyancy/wake physics which are built on top of Unity’s new HDRP water.
I wrote a script that reads the Mavlink and generates a contour map in realtime, and mapped some simulated terrain.
The bathymetry is not super accurate as it doesn’t take into account the attitude of the vehicle, sensor noise, etc, just treats the distance as truth and plots a depth directly below the vehicle on a 1m grid. In the future I should probably treat each beam as a probabilistic measurement fed into a map.
I think I will be able to run this exact script on the real robot and have it produce a real survey, all commanded over 4G modem from a laptop.
The biggest obstacle with this type of small boat is actually using it in the field is annoying – it gets tangled up on trash floating on the surface and gets stuck, sometimes ends up doing donuts, and doesn’t perform super well when it gets windy.
 Mostly interested in 4G/LTE-based control and mission planning software.
Mostly interested in 4G/LTE-based control and mission planning software.