Hello , Im setting up a skid steer boat and it’s going good, running good lines but the turns are a little sketchy, not smooth , it turns fast 90 degrees toward the next waypoint but then does some over correctlng back the other direction then maybe some bucking lol, it will then get onto the next long line and be fine. Hopefully someone can offer some tips to make smooth 90 degree turns and maybe show there parameter list.
I have done a lot of reading and many changes, it’s hard to know what really is effective changes.
Hello, thanks for responding, I have it going decent, I just figured I would see if anything is way off and i can fine tune and turn better.
I’m a noob but here is a telem log from the other day on dropbox.
The boat consists of 2 plastic pontoons and a metal frame holding them together approx 40"x 24" dimensions, one thruster type motor under each pontoon.
Your NAVL1 is 30 which could be a bit to high. Other than that your compass offsets look odd and you have no failsafes in place. I have a somewhat similar size catamaran and my NAVL1 is 16 I think
Thanks I’ll look in to NAVL1 , the onboard compass calibration does not work,I just play with the y axis to get the heading dialed in before I start a mission. Where are the failsafe features?
I watched half of your tlog. You need to calibrate the compass and figure out a way to get better GPS reception. What kind of equip are you using? a few pictures of the set up would be helpful also. CRUISE_THROTTLE should be in the 35 - 40 range for a 1 m/s auto mission. Considering the number of sat’s and hdop you had it did not do bad. I think the NAVL1 is to high like a said before but you need the compass and GPS to be better. Next mission you do mix up the angle of your turns to see how it behaves. 30,60,90,135,180,210 degree turns both left and right.
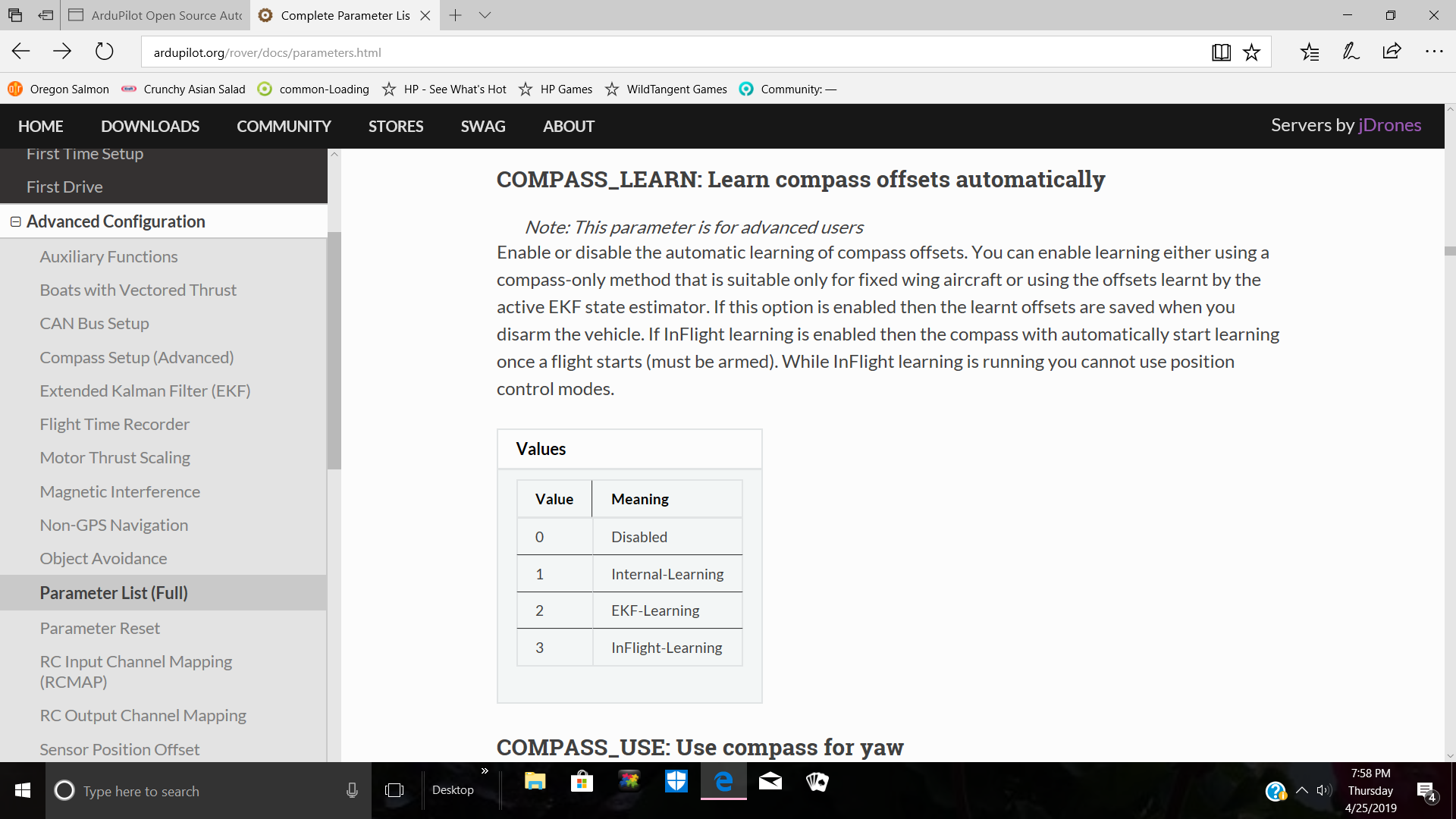
Also, after thinking about this a bit, you may want to enable COMPASS_LEARN and drive the boat in like a triangle of straight lines to get offsets. not sure if that would help. you need a good GPS fix for that.
thanks for the feedback. I’m convinced Northern California has no satellites. The HERE GPS and the other cheaper pixhawk type version never get GPS lock. I am using an older Trimble pathfinder GPS and that at least comes in, lol. I have done so many param changes and it doesnt seem like anything ever changes It, lol. Itruns the lines pretty good but when it gets to the 90 degree turns, it whips around so fast it kind of fights itself back and forth. I’ll enable compass learning. I do get the heading dialed in before Start. I tweek the y offset to get the heading correct.
I’ll tell you what, I disabled the pivot steering and its much smoother,lol . The biggest problem i have is the heading. I cant seem to calibrate the compass like the old style. the mag calibration which i guess is called “onboard” calibration just does not even recognize I’m doing anything
So overall everything went good, slow and smooth, then my heading got wonky and my satellite count went lower. I enabled compass learning as you suggested , I’ll leave it there for a bit. Another odd thing, today it didnt respond to my z compass offset I was giving to get the heading dialed in. it work the other day, i gave it an offset of 50 then bumped it up to 75 and it moved my heading perfectly to the direction the boat was heading.
If a HERE GPS isn’t getting a decent GPS signal I wonder if it’s some interference from the boat or installation issue. That’s weird. Are you just using the compass in the flight controller? If that’s the case it may not want to calibrate due to interference around it. Just throwing a couple things out there. I have a HERE on a quad and it is great.
What do you mean “Z compass offset I was giving it”? Are you suggesting that you are manually changing the COMPASS_OFS_Z,0 parameter? The parameter file you posted above indicates no compass calibration has been done. Maybe it has since that post?
That day I may have not needed to adjust the z offset, the compass heading stayed correct. Sometimes I need to tweak it to move the heading line to line up with the actual boat. If there is a better way to adjust it I’m listening, besides chronic no gps in Northern California, the compass heading has been a pain also.
When the heading is way off I may use a yaw offset in AHRS I think it’s called.