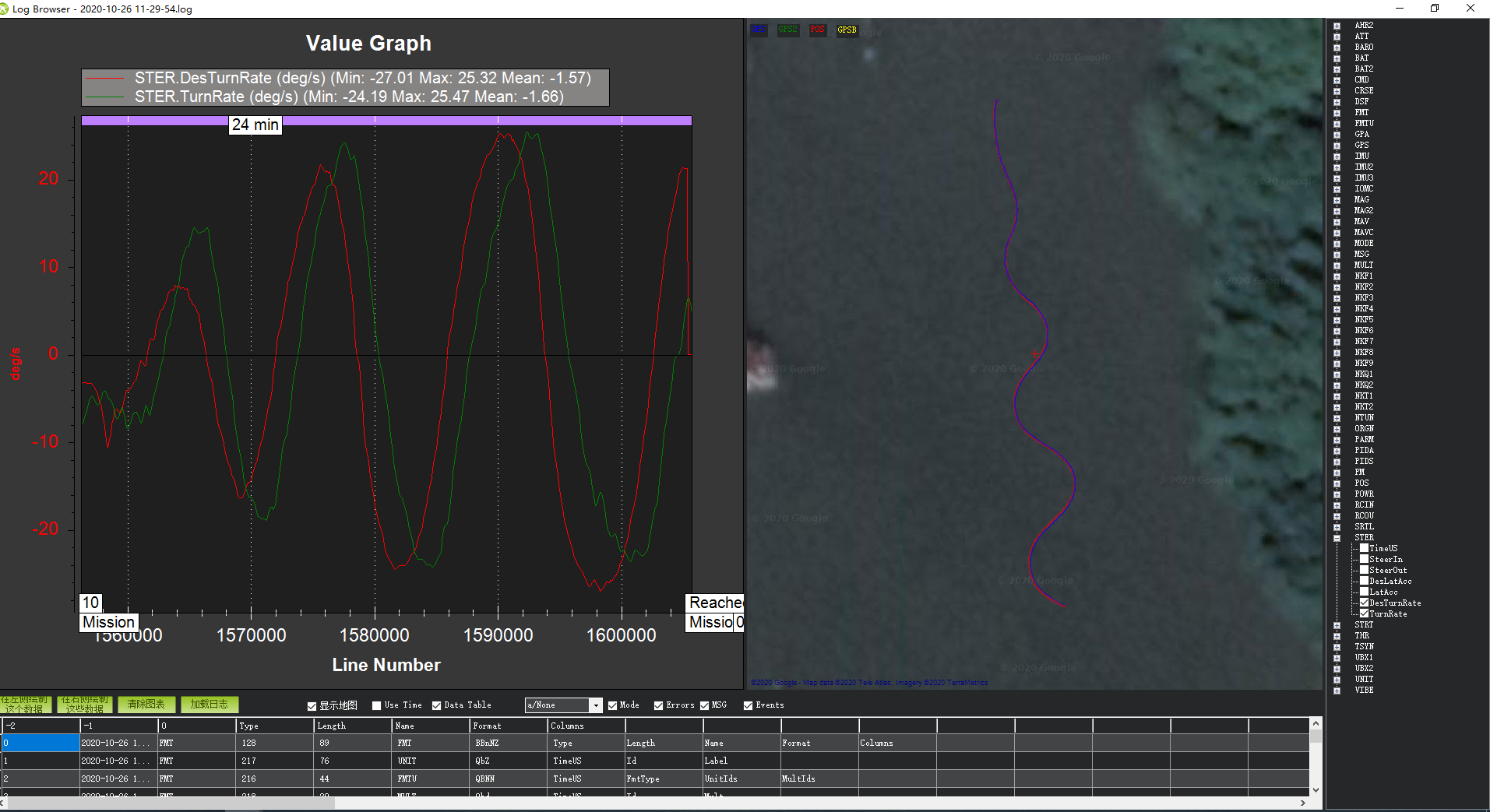
Hello, I am ZhigangYu from China. I am currently debugging an unmanned boat. The ship has been assembled and transferred, but the boat has not been in a straight line during the PID debugging. Do you have any good solutions? Thank you!
Hello ZhigangYu!
Have a look here.
https://ardupilot.org/rover/docs/rover-tuning-steering-rate.html?highlight=steering%20pid
It helped me with my sailboat, especially the video at the end from @rmackay9
Good luck!
Karl
Thans for your help Karla!
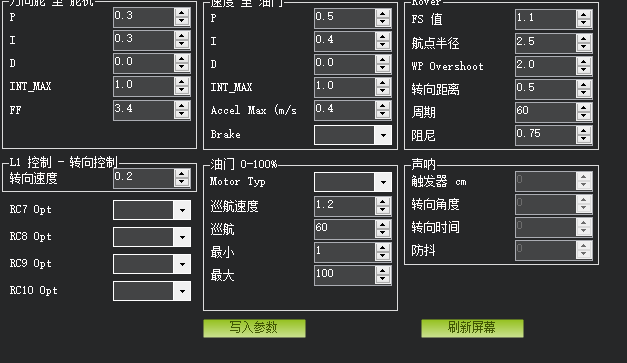
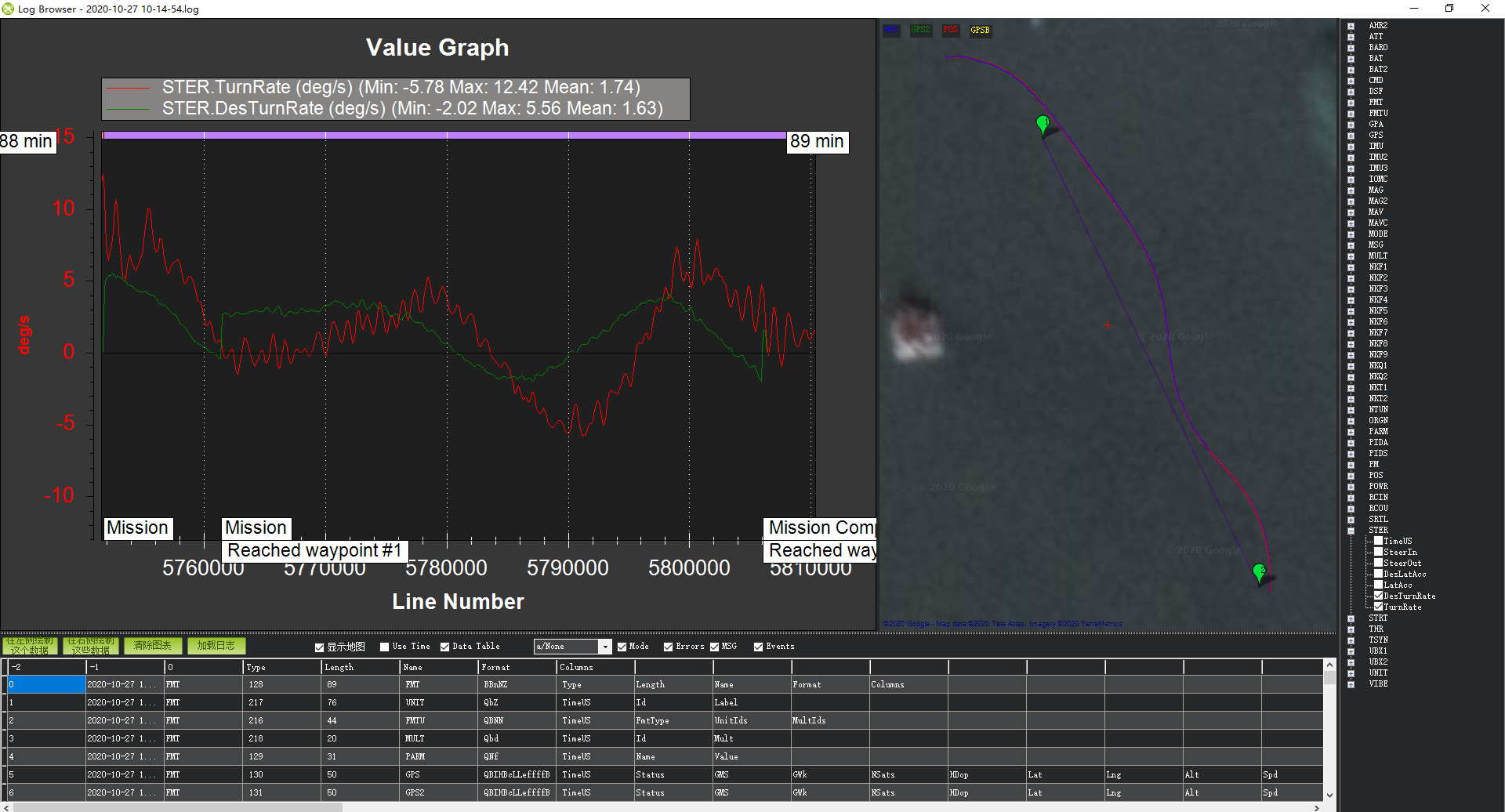
I try it again and I find when I set my NAVL1_DAMPING to 60.And the boat is go straight。It’s amazing!I don’t understand why this parament is so high!
The pidach is different with piddes,I want to take is best. If you have some suggestion,could you tell me? Thank you very much!
Sorry, I have really no experience with that parameter.
Hope someone else will come by here.