When I try to use Blheli32Suite the following mensage is shown:
Initialization of serial 4way failed, no active motor outputs found!
Please select an apropiate motor output protocol in Ardupilot!
There is no way to get connected to the software(I need to set motor to bidirectional). I found some theads related to passthough issues but none of them fixed mine.
Am I doing something wrong?
Thanks for your help!
ESC: MAMBA F55 4in1.
Here is the param file with MOT_PWM_TYPE=4 for DShot150 test.param (16.3 KB)
I have tried to modify SERVO_BLH_MASK (8-12) and SERVO_BLH_OTYPE with the same error in BLHeliSuite.
Those are not typically required but understandable that you are trying it when it’s not working. A suggestion that I have seen several times before. Set it to Dshot600 and try changing SERVO_DSHOT_RATE . Try all options.
Out of curiosity you said I need to set motor to bidirectional That is not common for Copter, what’s the use case?
This is for an omnicopter with 8 motors. But first of all the ESCs have to be set to bidirectional. I’m using a cube so there is only 6 dshot outputs, after configuration I’ll use MAIN outputs with PWM.
I will try your point as soon as possible, but right now i’m running out of ideas. I even try a betaflight passthrough with an older FC, so old it cannot be updated and passthrough is not supported in that version…
DShot is not mandatory once the esc is configured. It would be great to have 8 nice DShot outputs but cube has only 6
After trying every single option, I have done it!!! There is something wrong with version 32.9.0.5 Blheli Suite. I finally downloaded 32.9.0.3 and it worked. But only with DShot600, not 150 either 300. It worked as it should:
MOT_PWM_TYPE - 6
SERVO_BLH_AUTO - 1
Cube Orange
BRD_IO_DSHOT = 1
BRD_SAFETY_DEFLT = 0
SERVO_BLH_AUTO = 1
SERVO_BLH_MASK = 255 (Channel 1-8, I tried channel 1-6 too as I only use 6 channels)
SERVO_DSHOT_RATE = 0 (default 1Khz)
SERVO_DSHOT_ESC = tried 0, 1 and 3
MOT_PWM_TYPE = 5 (300, only 300 and 150 are working)
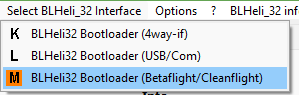
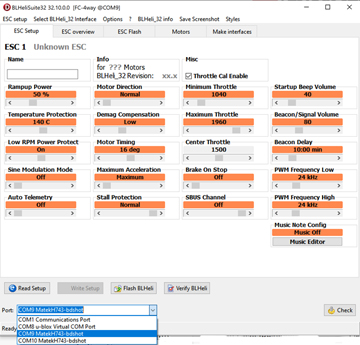
You don’t need to select the Interface. Select the Mavlink com port (not the SLCAN port obviously) and then connect. Example here with a different Flight Controller but it’s the same for all.