Cube black, 5S, Zeez 4x60A BLH esc on Aux 1,2,3,4, ESC Telemetry on GPS2, 13" props
It took me quite some time to get the BLHeli32 ESC mostly running, but a few issues remain:
ESC Telemetry is only transmitted when the copter is armed. Is there any way to get telemetry before arming?
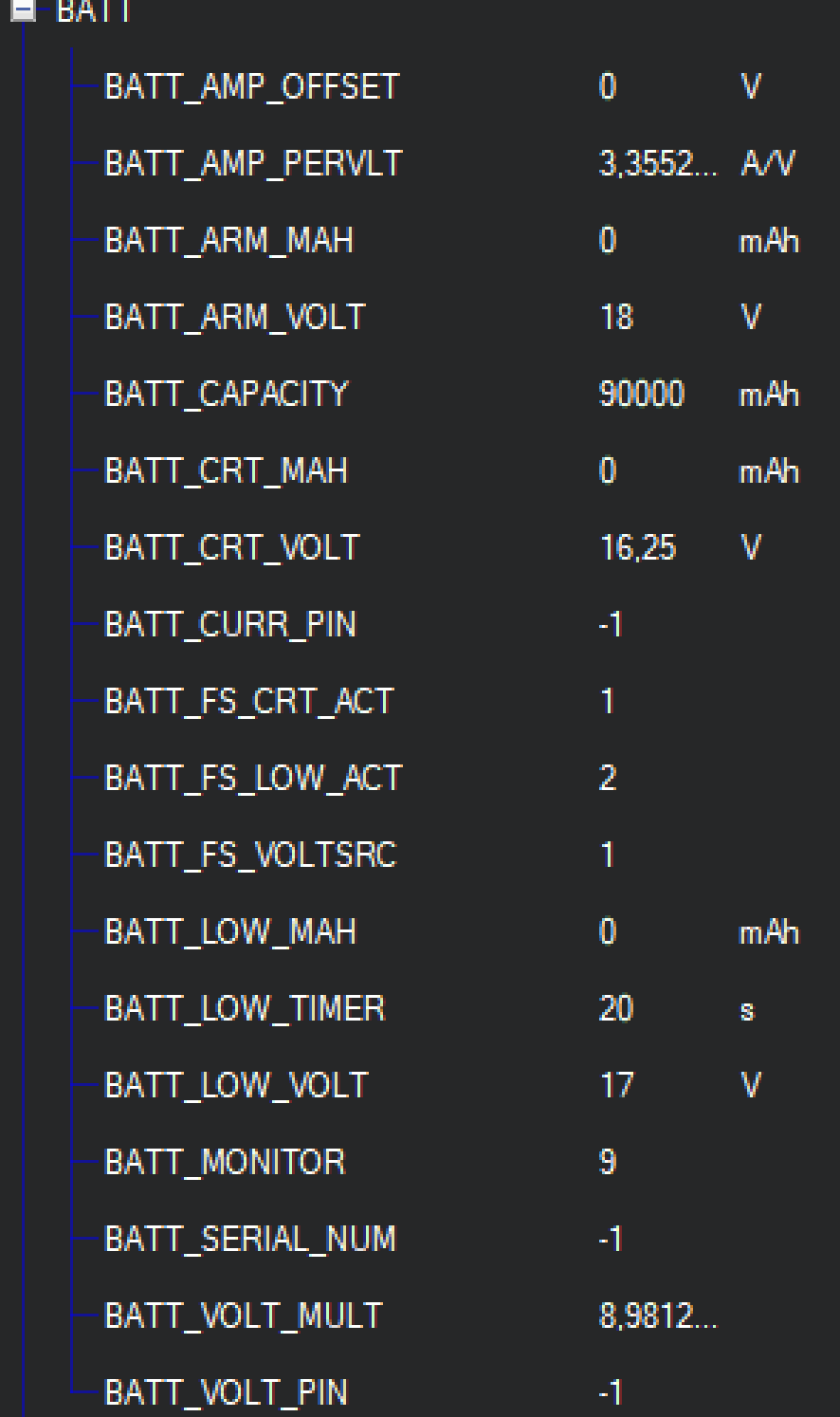
When the copter is armed all works well current and rpm values seem reasonable. But voltage is always shown around 18.5V. Calibration in MP seems not to effect the ESC telemetry. And in the BLheli-suite there is only current adjustment.It doesnt matter if i connect a 4S(16V) or a full 5S (21V), reported voltage is always about 18.X.
Here a post with exactly the same issue on different hardware: BLHeli32 ESC telemetry setup - how?
Most importantly, when I disarm the craft, Telemetry and everything stops, but the motors continue to spin at a fairly low speed. About half min arm speed. There is also a slight knocking noise then, i can stop the motors by hand, but they definitely continue spinning. Its not some freewheeling or some glitch.
When I arm the copter again they stop for a second (it seems that the ESC then re-initializes) and then they spool up regularly, but when disarming again they go to some kind of minimum speed, but do not stop. As long as its like that I can not put props on.
Edit: When the motors are spinning and i reboot the FC, they continue spinning. If I try disarm by termination command, the motors also go to the slow spin, but every few seconds one of the motors spools up for a short moment. I will put a video under the link.
You have Arming check at 0 and Arming Rudder disabled. So I suppose you are controlling it thru a GCS (no Flight Mode chan set either). Disabling all Arming check is a bad idea but anyway if you want to continue in this manner set MOT_SPIN_ARM to 0. It’s not disarming per the log.
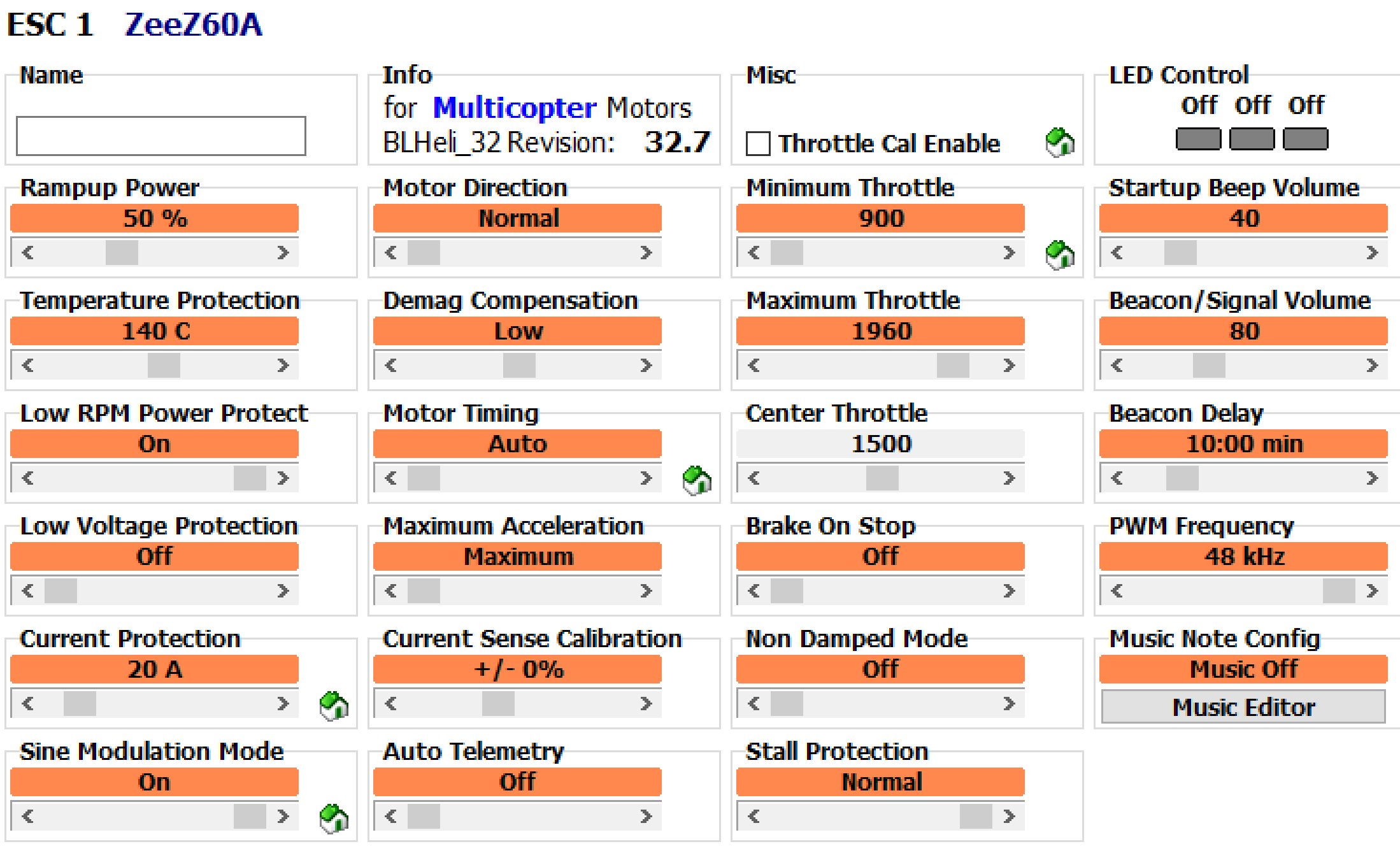
You will probably have to turn off Low RPM Power Protect in the ESC settings with the kV motors suitable for 13" props.
Thanks for looking into this. I deactivated arming checks only for the motor tests on the bench and was testing with GCS. I reactivated some arming checks to see if that makes any difference.
Deactivating Low power protect did not make any notable difference and I thought it would be ok to use since my voltage is not too low with 5S, (EDIT: Motors are 580kv Dshot600) , but if its safer I will keep it off for now
For the log you are correct, it did not show the disarm, i must have mixed the files up. I updated the link with a new log using the revised settings as described below:
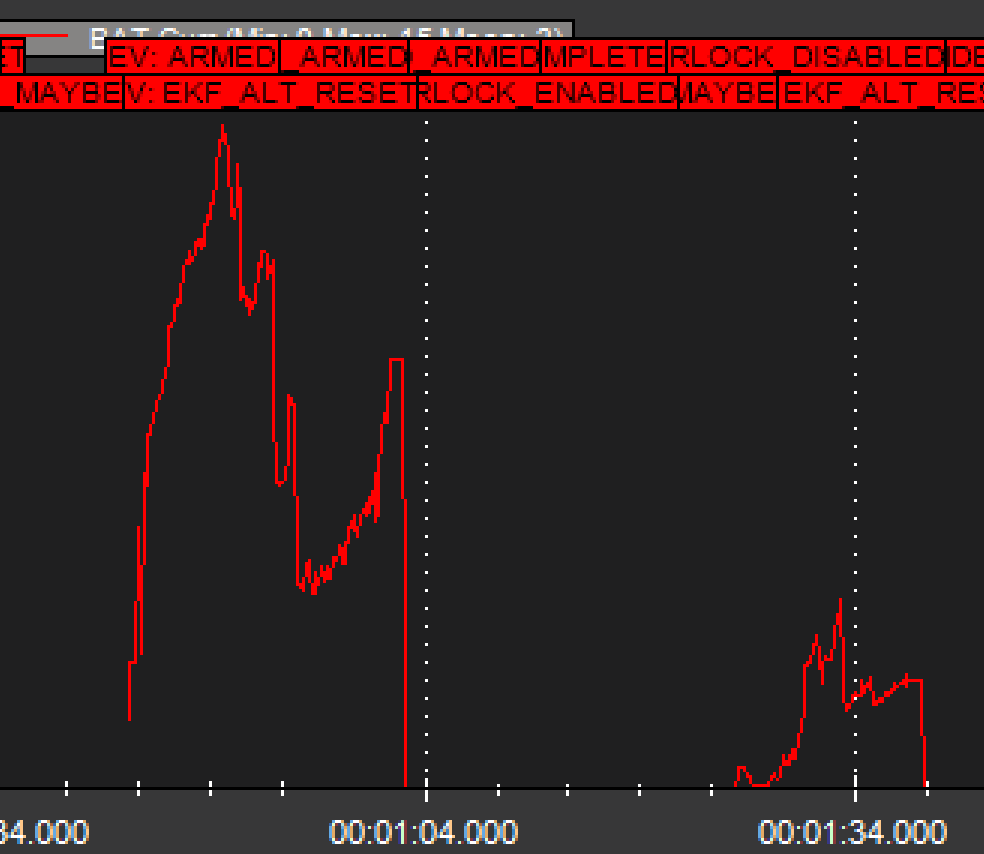
You see I first arm, then keep throttle low until it disarms (low throttle disarm). I verified after MOT_SPIN_ARM is set to 0, the motors stop now in this disarmed phase. If I set it back to 0.1 i get the spinning behavior again when disarmed.
However, then I arm again and try a motor emergency stop with Mavlink command 185. But after the emergency stop the motors are still spinning slowly as before, even though it shows disarmed and also if MOT_SPIN_ARM is set to 0.
In the parameter BRD_SAFETY_MASK I disabled the ESC outputs when disarmed, so i don’t understand how MOT_SPIN_ARM can have an influence in spite of this.
Looking at the log I am not sur i see a disarm record, two GCS OSDs reported the copter as disarmed.
Ok, I tested more BLHeli settings and it turned out that the culprit was the setting of “Current Protection”. If I disable this, the motors stop rock solid on any kind of disarm, also when i set MOT_SPIN_ARM back to 0.1
So that should be some problem of the ESC/BLHeli. On APM side I don’t get my head around why MOT_SPIN_ARM seems to have some effect on this issue while the craft is DISARMED.
What remains are the issues of missing ESC telemetry when disarmed and the wrong voltage readings.
Does the GPS2 port behave any differently when disarmed and is there any related parameter?