HI all,
I have setup a Blade 300CFX helli using KakuteF7 miniV2 board running latest stable and finished my tuning up to the waypoint flying tuning.
It flies great in stabilize and Acro mode but i notice that it does 1~3 toilet bowl movements before settling down, when you switch to Pos hold mode. It might be just normal but would like to have suggestion from you guys.
Also if anyone could please look at my log and suggest me if anything needs more adjustment or tuning.
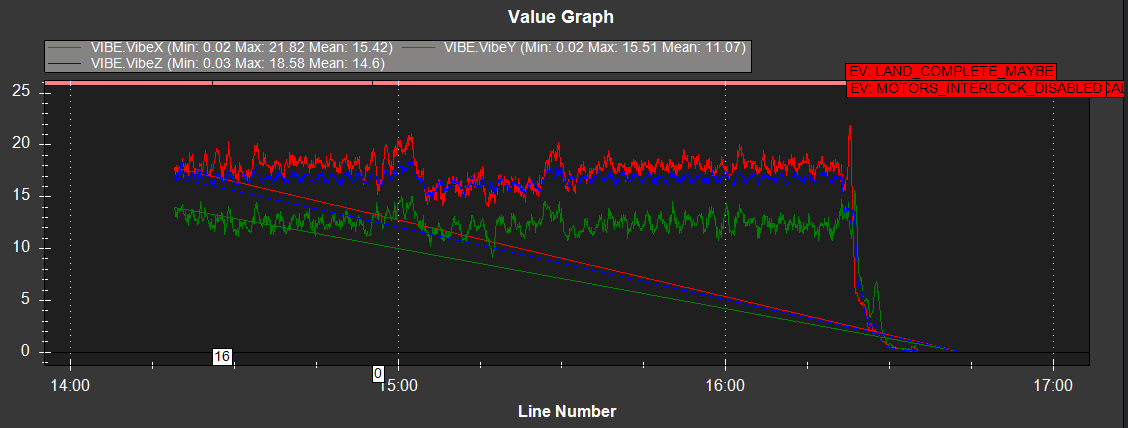
One more thing in my log that i noticed X and Z axis vibrations come down after i switched to Stabilize mode from pos hold mode.RPMs are fixed using castle esc governor.
I just went through this and would love to see your graph of PSC_TVX vs PSC_VX and PSC_TVY vs PSC_VY. Then a graph of PSC_TPX vs PSC_PX. You could do the Y’s too…
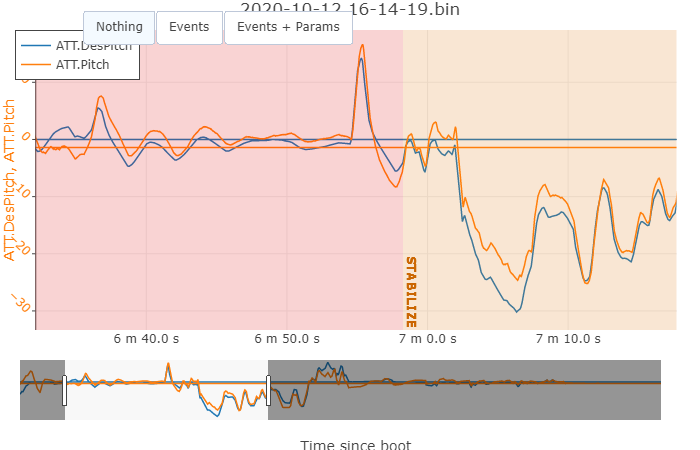
Looked at your data, looks that the rates are not following the designed one, i suppose you have to refine the tuning. Also you have misalignment of 10 deg in pitch attitude, check your CG and base alignment of the AHRS.
Checked again your pitch versus the commanded one…
somehow yesterday i saw 10 deg. difference …
now i see it is less than that… but you have a definite difference.
I took a look at your logs, searching for a specific value, and the ones I was looking for are not in the log:
PSC_TPX vs PSC_PX
PSC_TVX vs PSC_VX
PSC_TAX vs PSC_AX
I didn’t see a tree for PSC at all, and I’m not familiar with the Kakute to know if it logs those values. So, I’m a bit at a loss.
Those values were the ones most relevant to the solution I found for higher accuracy and no toilet bowl in PosHold.
From our latest experience, if the toilet bowl oscillation does eventually settle down (and doesn’t just start up wandering again), try upping the D gain a little (I think the parameter is PSC_VELXY_D). Ours was default at 0, and we went to 0.20 where we noticed a big difference. Then we played with the I gain again to further tune that as well. We eventually raised D to 0.40 as our final setting. Just example numbers, as our heli is quite a bit heavier than a 300…
Do you think the missing PSC tree could be due to the fact that i have disabled EKF3?I am using EKF2.The reason behind disabling ekf3 is that my gps is small and can’t give stable velocity readings and EKF3 needs solid gps velocity values from the gps and all sensors are fused in ekf3(i believe).
No. That isn’t the reason. What version of AC are you using. An older version will have a different signal names. Also those signals won’t show if you don’t go into loiter or a position stabilized mode
@ninja_zx11 I looked at the log file that you posted. There is something wrong with the file. It is missing all of the parameters that are normally stored at the beginning. It is missing the MSG signals as well as the PSC signals. It starts in the middle of the flight rather than when it is armed. So I’m not sure what to tell you other than the log file is bad.
Kakute F7 V2 Mini can only save approx 2 mins of log due to the presence of small flash chip and missing SD card.Before it was just over-writing the log.