I ask for your help figuring out what happened in a plane crash (PX4 with Plane 3.6). I have no airspeed sensor so ARSPD_ENABLE and ARSPD_USE are both set to 0.
My Bix3 (Bixler) took off in Manual and then was flying well in RTL at 100 meters altitude.
I then lifted the flaps completely. The plane, which was still in RTL went into a nose dive. I switched to manual to take over control but I was too late and the plane crashed.
The The flaps are on RC channel 5 with pass-through, so the PX4 doesn’t control them. The elevator is on channel 3.
I have analyzed the log file and wasn’t able to find the reason for the plane going into the nose dive after lifting up the flaps completely.
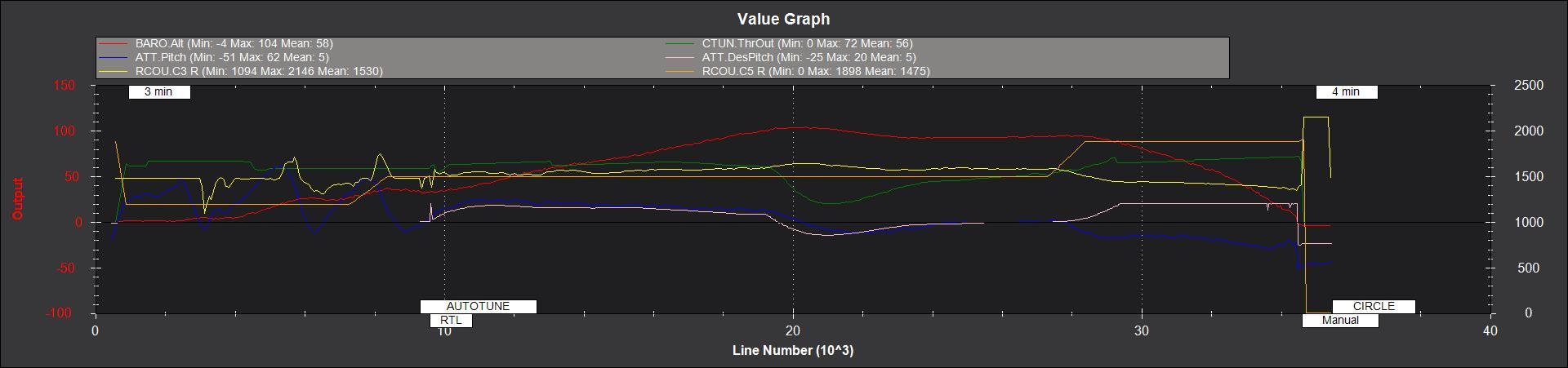
I can see in the graph that the flight controller knew that it had a negative pitch (ATT.Pitch) and it tried to achieve a positive pitch (ATT.DesPitch) by outputting elevator “up” of about 1400 on channel 3 output.
Somehow this wasn’t enough elevator “up” to bring the attitude back to horizontal? I have to say that the max elevator “up” value is 1100, but I have no idea why the flight computer didn’t output the max elevator “up” possible.
I am attaching the log file and also the graph. I trimmed the log file to the essential part so the filesize is low enough to be uploaded here.
Any ideas why this whole crash happened as it did?
Is it possible the airspeed was too low for flap retraction and caused a stall? If the wing is stalled there is no amount of up elevator that will save it. TECS will limit pitch and bank angles so maybe that is not tuned right for your airframe? Please post the whole log.
The airspeed was high enough, I have been flying this plane long enough to know that it didn’t enter a stall.
I can’t explain why the PX4 didn’t output more “elevator up”. The elevator output was around 1400, with 1500 being neutral and 1100 being maximul elevator up. (Channel 3). The PX4 had a desired pitch angle of 20 degrees and it knew that the actual pitch angle was -20 degrees, so lots of “elevator up” would have been required to reach the desired pitch. Instead it only output very little elevator up.
Here’s the complete log, from the start until just after the crash:
I cut the part after the crash, otherwise the log would have been over 600 MB large (it took me several hours to find the plane after it crashed and the log kept on going during this time).
Did you get to the bottom of this?
I have had two crashed in the same week with the same symptoms.
I takeoff with full flaps, after having climbed a bit I reduce to 50% flaps and keep climbing, later I reduce to 0% flaps and the planed goes to a nose-dive and crashes nose first from 80m height. Airspeed is good, I don’t have an airspeed sensor, but there was no wind and gps speed is high and throttle was at max (still climbing).
My best guess is that reducing the flaps to 0% produces a certain “un-ballooning” effect, just as setting the flaps to 100% balloons the plane, just the reverse effect.
The “un-ballooning” drops the plane’s nose therefore reducing the pitch angle
The autopilot does not compensate for the reduced pitch using the elevator which leads to altitude loss and eventually “nose first” crash.
This happened to me in RTL mode, which should target an altitude of 100m. The fact Plane did not translate the altitude loss in elevator up in RTL mode is clearly a bug.