Hello. I’m trying to do Big ArduRover. Equipment I use:
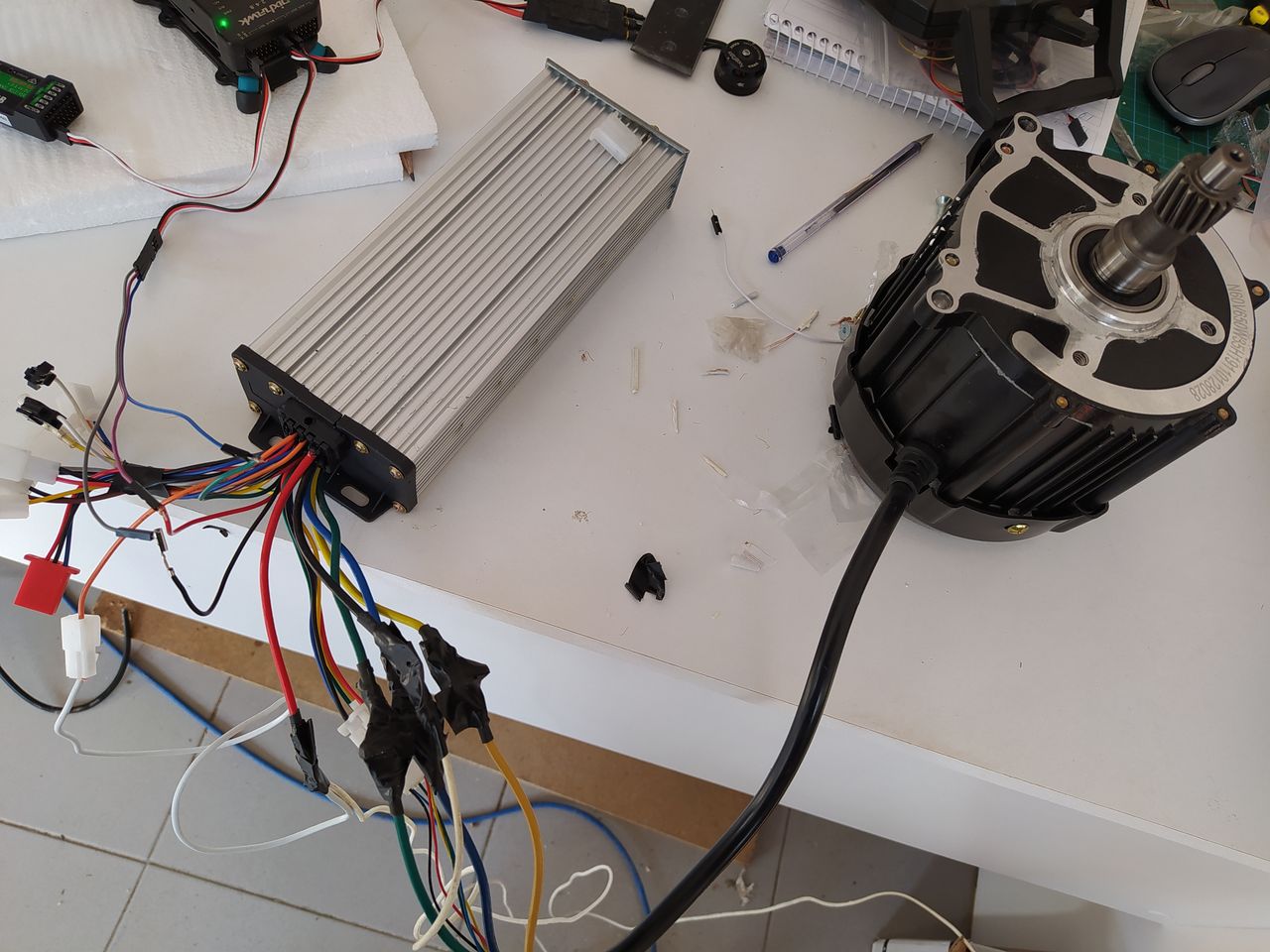
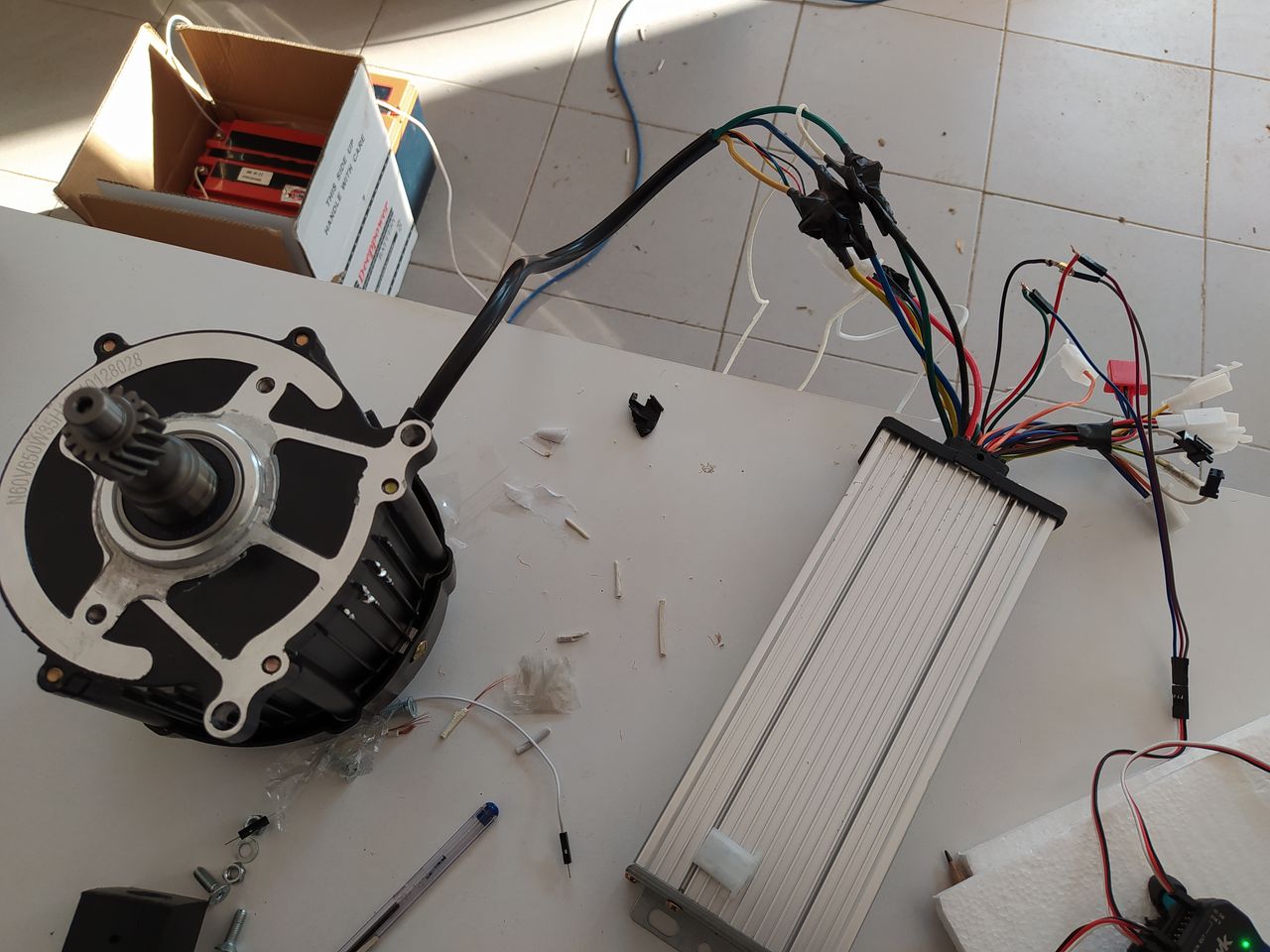
1-) 2 Pieces 650W Brushless Motor
2-) 2 Pieces 48-64 V / 1500W Brushless Motor Controller (Electric bike Driver)
3) 5 Pieces 12Volt 60Ah gel battery
4) Pixhawk Flight Controller
5) ArduRover 4.0 Firmware
I cannot move the 650W motor.
.
The other small motor (2205) is moving. (For testing)
.
I have no experience with Rover. I am considered experienced in ArduCopter. I tested the Motor and Driver. They work.
.
How can I run this type of motor and driver with ArduRover. I want to check with Cuav V5 +…
.
Thank you in advance for any help.
@cala2 Thanks to you, I understood the problem clearly. I think it will be a Mechanical transformation that you are talking about. Can it be used stably with ArduRover? Or do you have any other driver suggestions? This vehicle should be able to act autonomously.
.
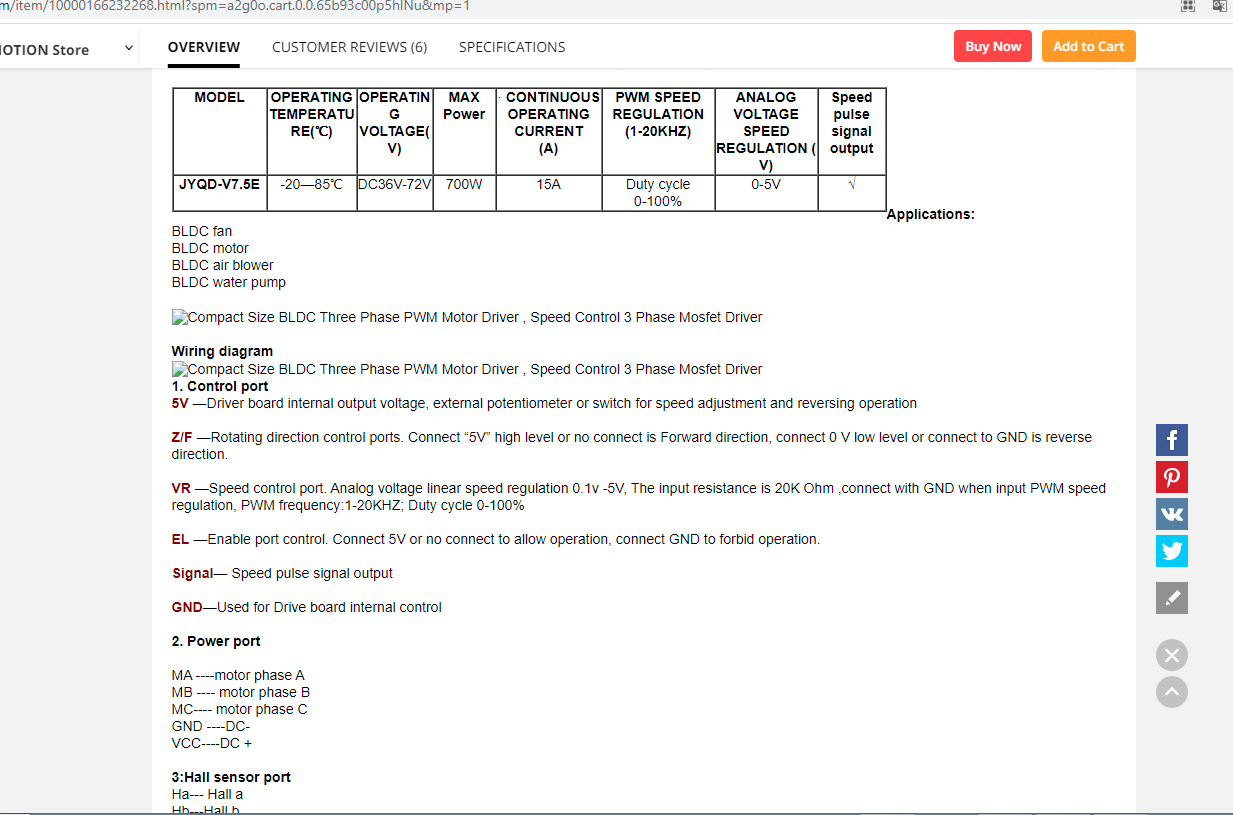
Since it is a brushless motor driver, what is the probability of converting the Analog signal to PWM inside. If I open the drive inside, can a solution be found?
.
Thanks
I starting a similar proyect than you, Im not an expert but I hope that you cant, Jiri solution looks the best if you can buy it, (I have customer restrictions but try to find here ) I read that a low pass filter do the same job but I dont try yet. Nice frame Im going to share my work when I advance a bit.
I guess you are not able to move the 650 W motor as there might be a coiling issue within the motor. For the best power transmission motor you can consider reliance electric motor.
Thanks.
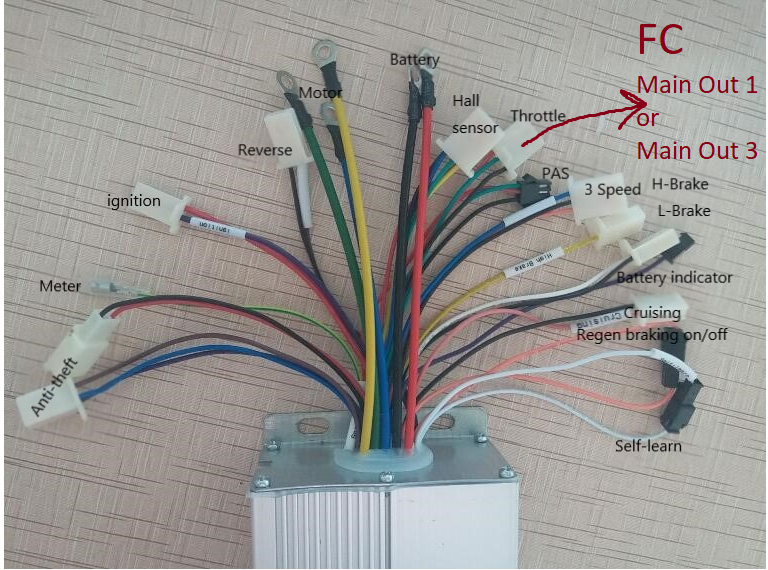
The board Jiri Landa pointed out is to convert the PWM signal from the flight controller to Analog signal like comes from the manual throttle control.
That’s what you want in between the flight controller and the speed controller.
I think the board you reference still requires an analog input, and it outputs PWM to a small motor.
Hi,
I’ve made a rover with BLDC motor but I have problem with brake.
The bldc motor don’t have brake, when you stop order the motor is in free wheel.
How don’t make it works with the ardupilot ?
Thanks
This looks like you are trying to solve the exact same problem I am. Any luck on this with any of the boards presented above or other configuration details? I have another board on order that is meant to drive the motor directly from PWM signal ( Amazon.com: RioRand 400W 6-60V PWM DC Brushless Electric Motor Speed Controller with Hall : Industrial & Scientific) but I am just shooting in the dark. I’ve tried a throttle like the one above on my motor controller with no luck, and unfortunately these things come out of China with zero documentation so I’m just trying different things until I get it right. Best of luck and thanks for any pointers!
@Havas_Robotic even i m working on the same project can i know the tire size that you are using ? it would be of great help and can you provide me with the link of the product thankyou