Hello,i am working on a octo H drone MTOW 160KG the specs are mentioned below:
Motor -x11 MAX hobbywing
Prop. 48inch
Battery- 18S 54000mah
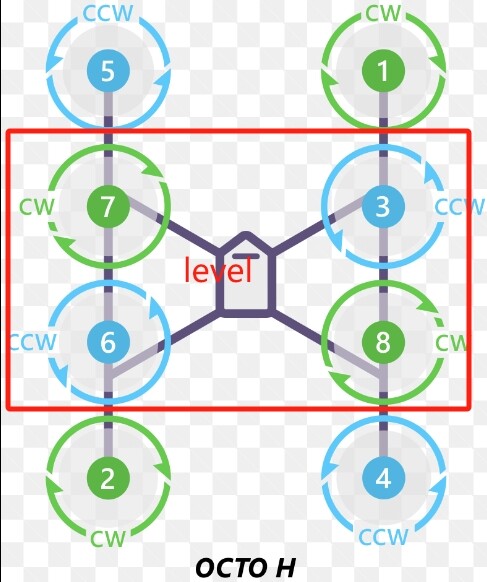
OCTO H FRAME
frame weight 120KG
Payload about 40KG
The outermost motors 1, 5, 2,4 have a mounting angle of 4 degrees, and the four in the middle are horizontal.
The current issue is that, after preliminary manual PID tuning, pitch and roll controls are adequate.not very well but is OK. YAW control was initially difficult to manage, but it saw significant improvement after increasing the P gain a lot. However, the aircraft occasionally spins suddenly by about 30 degrees and cannot lock the heading well. Especially in stabiliz mode. Once the aircraft starts spinning, it must be manually corrected with the controls.
During flight, i perform a stick spin maneuver, can noticeably hear the motor speed change with a somewhat slow response.
Especially during takeoff in stabilize mode and at lower altitudes below 1 meter, yaw tends to spin easily. At higher altitudes of 2-3 meters, it is much better, and the majority of the time it can lock in place, but occasionally it still spins on its own.
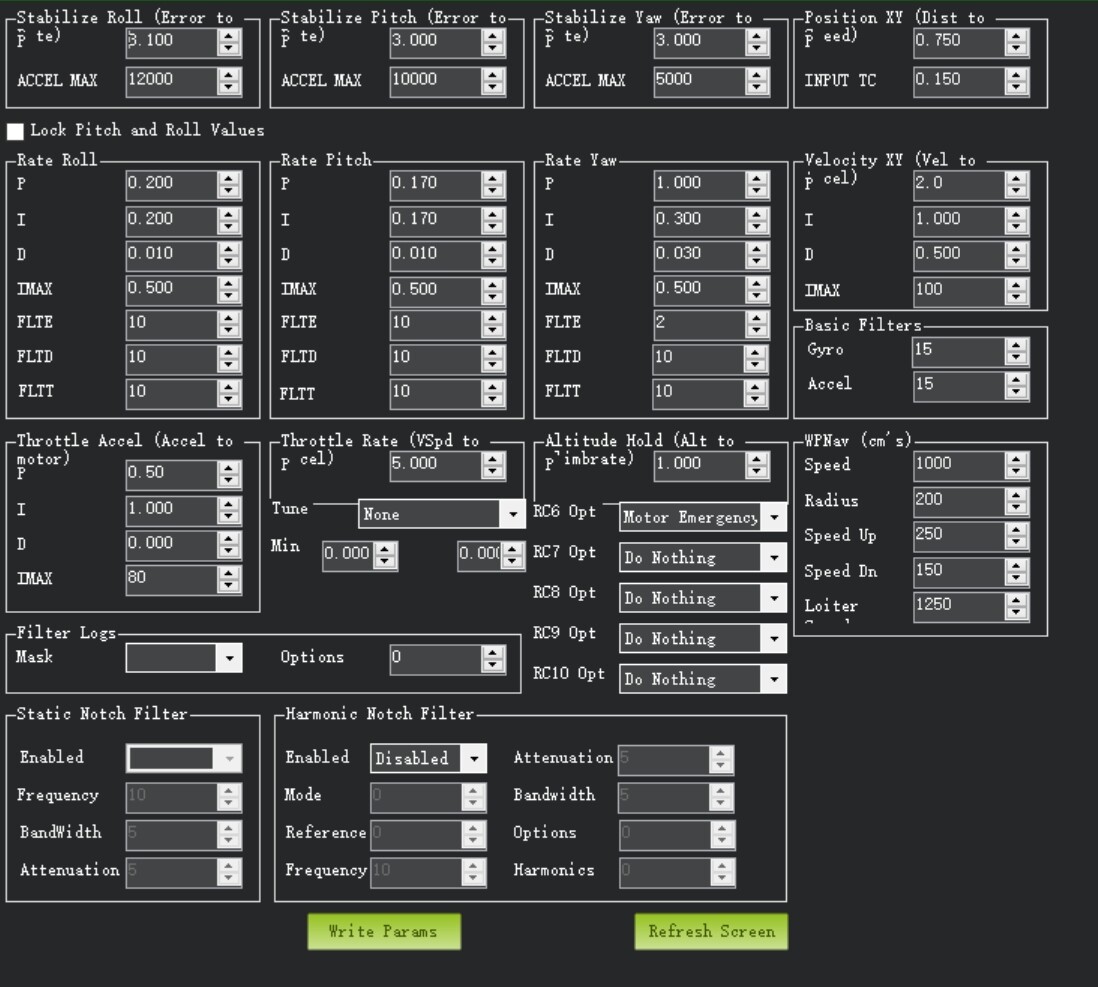
Here is the parame:
battery is not set because 18S is too high
Use an independent battery to power the flight controller
MOT_THST_EXPO 0.8
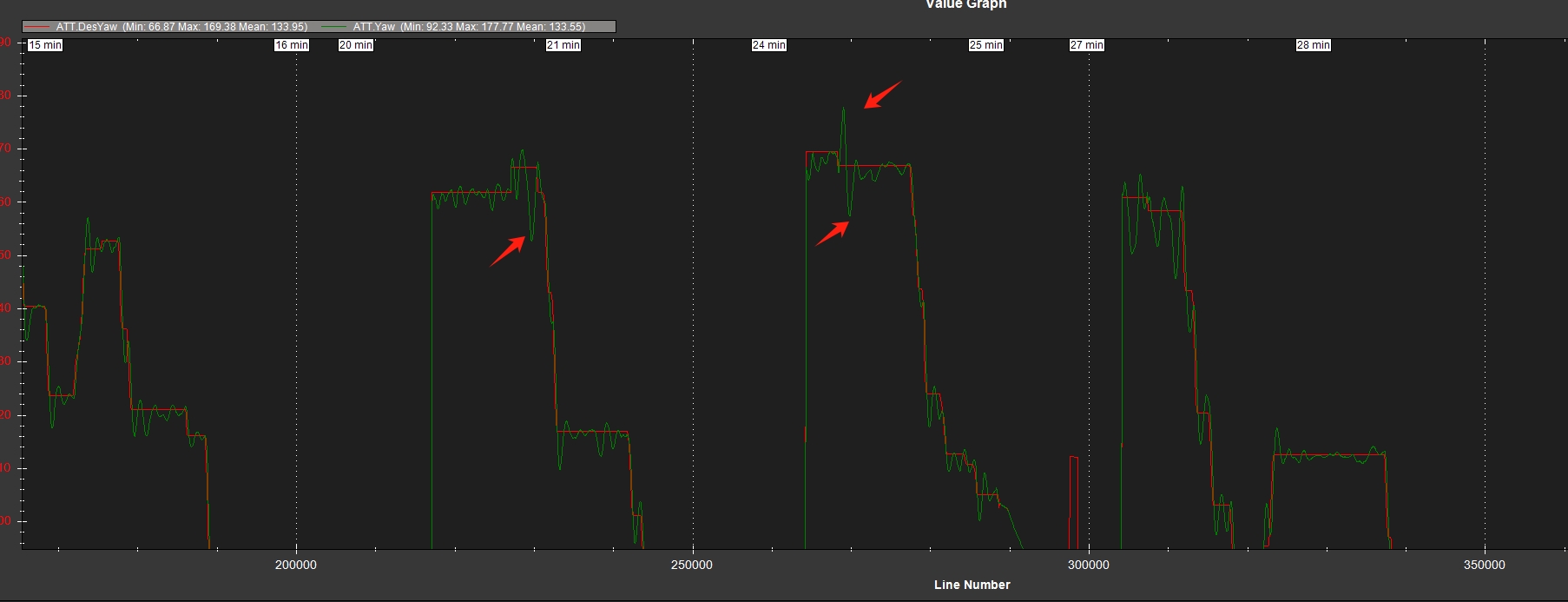
here is the log 003 MTOW is around 150kg 004 is 160Kg