Any info appreciated for next build. This one was destroyed on impact. Im new here so i don’t know how to post a log.

I see a chair… Is this for a manned aircraft - if so we cannot advise.
It is unmanned. Just for looks.
1 Like
here is a link. can you take a look? thanks
running 42x10 props
amp 200amp escs
6 12s tattu batteries
had about 5 good flights on it, then tried to run alt hold and it wrecked
First of all Wrong Firmware Version Tag
So here is my take on the log
It’s evident that your copter had increasing oscillations, and also the pilot gave roll input which caused it to crash (it would have crashed after a few oscillations anyway)
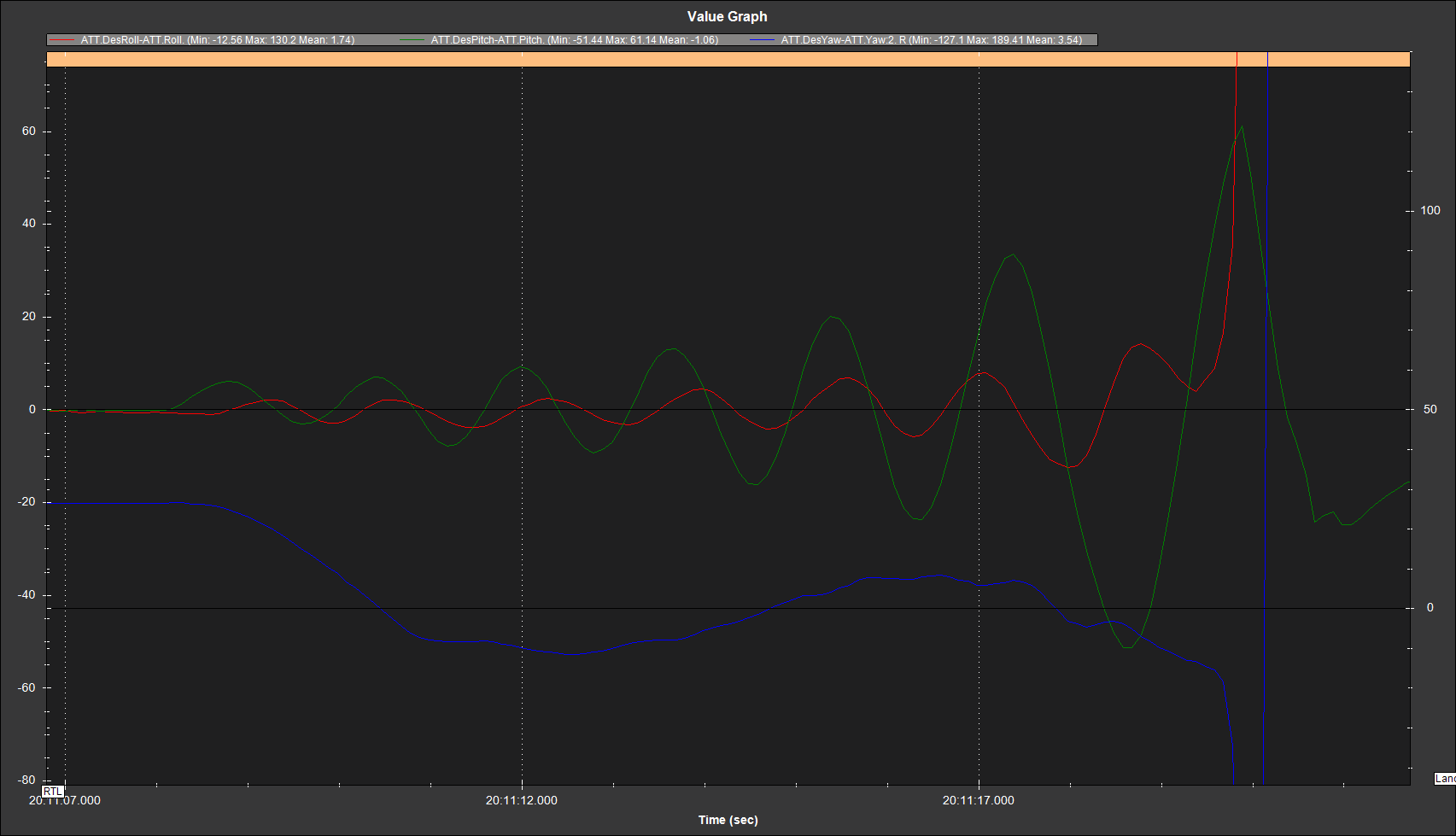
Check if these flights had any pitch or roll maneuvers, I assume not
I’m also assuming you turned off your transmitter for testing RTL which got triggered successfully.
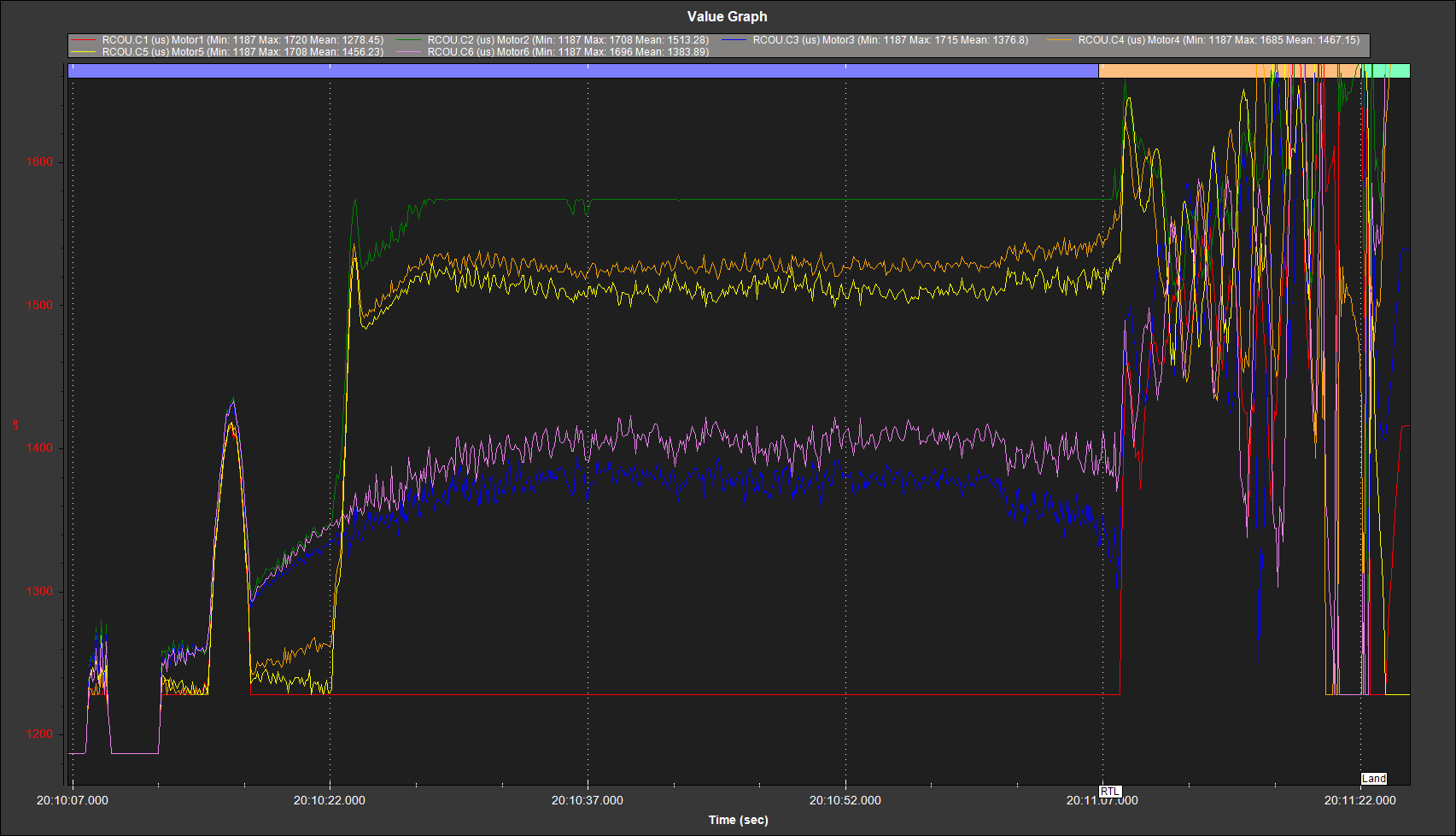
In RTL mode, copter tries to achieve a particular altitude first and then navigate to home position and land. So the moment it tried to increase its altitude and increased motor outputs, it suddenly got unstable.
Also, your motor outputs had large variations in stable hover. Especially M1 and M2 had almost 35% variation in speeds. It seems like your copter is very asymmetric
I cannot pinpoint the exact reason of these increased oscillations, maybe someone with more experience in similar scale vehicle can help.
My very limited to no experience with very big copters says that its your PID gains, in my opinion(could be very wrong), you should decrease your P gains and increase little bit of D gain
It’s a bad practice to switch to Auto modes before fully tuning in Manual Modes like Stabilize and Alt Hold.
Also enabling PID logging can help tunning PID gains
I can see that in this post, you were advised to enable harmonic notch filter and getting a voltage sensor. Both of which are ciritical for a good tune.
@manavgandhi17 Is there some rule about discussing manned vehicles on this forum?
There is no specific prohibition for discussing manned vehicles as they pertain (analogously) to topics on the forum, so long as the vehicle is NOT an ArduPilot controlled platform.
The dev Code of Conduct prohibits development of ArduPilot for any application where a person is onboard.
3 Likes