Hello everyone today I’m testing my big copter but when he climb up (28 sec) and little bit yawing (up to 36 sec)
Next problem is not very well altitude hold (47 sec , 1:40 sec same as , 1:46 sec , also bad 2:05 sec)
In flight I’m only control loiter mode = 1500 and last land mode
When I know my battery is empty so I landed my copter and I see what is a problem with this error so my 2 motors are very hot another 2 is normal , how it’s possible ???
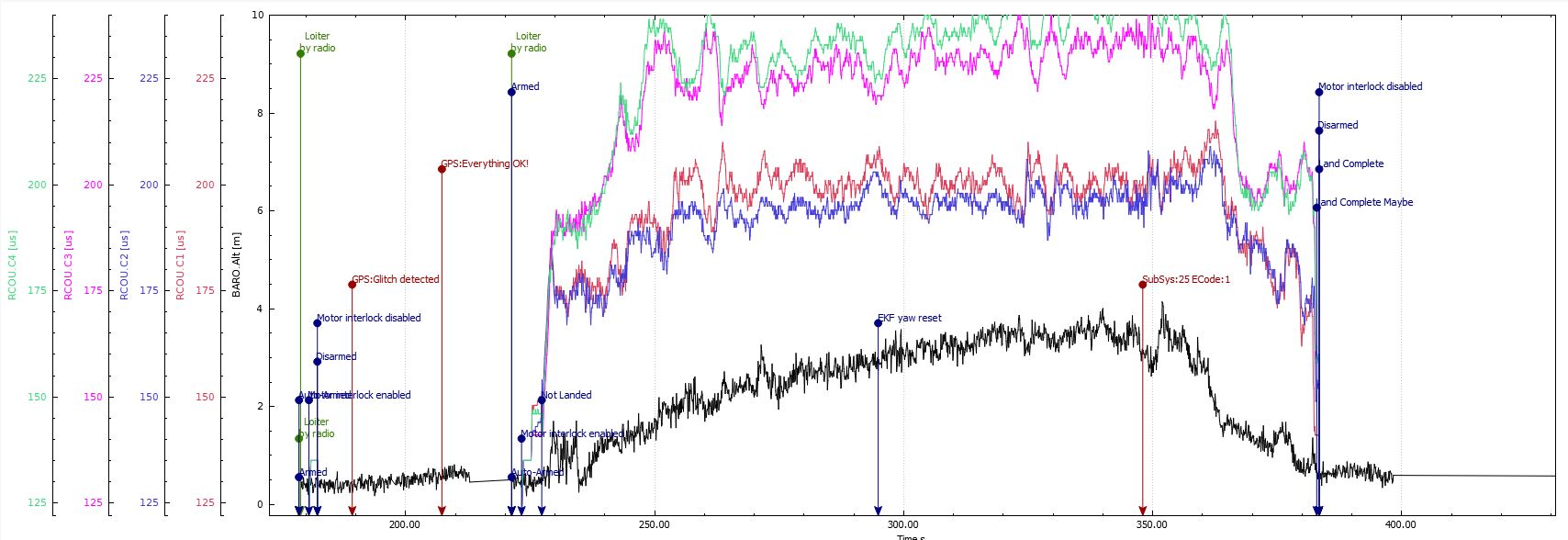
This is a image from my copter , and I have also telemetry some data
It’s pointless to post the video into the message. Post a link to it. And only a .bin log will help diagnose these problems. A link has to be posted for those also.
The clockwise motors are commanded to max with that payload. This usually indicates the motors/arms/frame are not level causing a Yaw bias and also why you burned your fingers on 2 motors.
Sir payload attached to center , and sir I thing I’m damn sure I was calculate all armed are same weight also same size to attached toghter.
May-be ESC faulty ? Because same 2 ESC are hot
Thank you
This is often seen on frames with round arms. The motors are not level causing an imbalanced yaw thrust. The ESC’s and motors getting hot are an effect not the cause. Usually this is an easy fix by rotatingt eh motor mounts so the motors and props are perpendicyular to earth. On that PVC plastic frame I’m not sure how you can do that
That’s right , but little bit , because when i attached motor to arm at that time not fix it but I’m fixed to super glue but at that time 1 motor little bit sliding to the adge this problem fixed at that time but I’m let because super glue fixed in 10sec.
I thought then, what would make a difference , but no I was wrong.
Now I’m fix this problem and try again.
Thank you soo much sir