I am trying to build a bicopter VTOL similar to the V22 Osprey. I have set the Q_FRAME_CLASS to 10 and Q_TILT_TYPE to 3. Servo 1 and 2 are set to throttle left and right while servo 3 and 4 are set to tilt left and right.
However, the left tilt servo slowly tilts forward by itself the moment I increase the throttle beyond its armed state. The throttle will increase by itself when I pull up on the elevator. I can’t seem to figure out whats wrong. Additionally, I am still getting high frequency oscillations despite setting Q_A_ANG_RLL_P to its minimum.
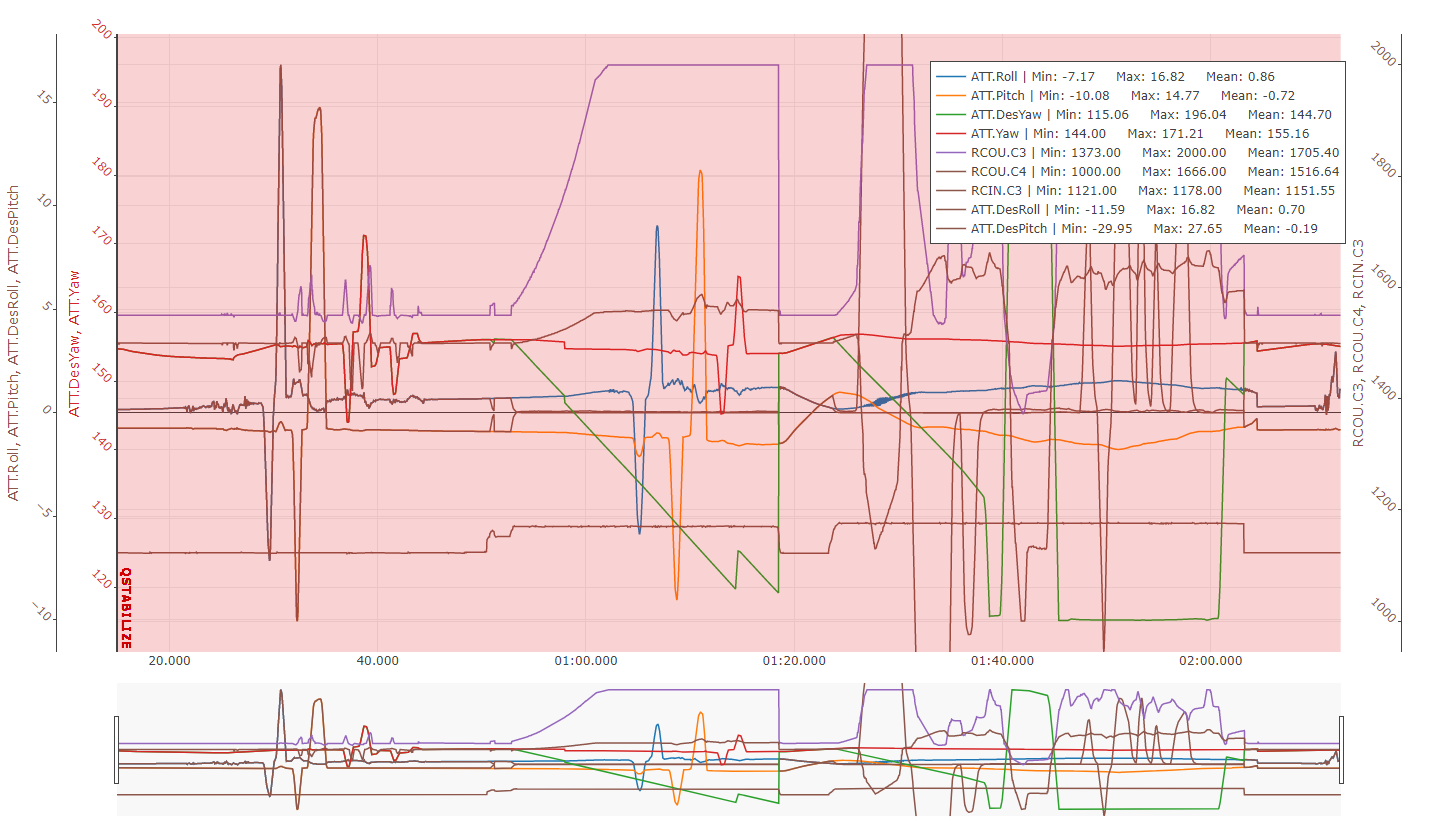
Does anyone know what is going on? Attached is the log file from a bench top test, I first moved the aircraft in all the different directions in the armed state, then increased throttle beyond the armed state and moved the aircraft, then I moved the controls around. Looking at the log, the yaw value in the AHRS seems to increase by itself even though the aircraft is stationary on my table.
I am also building a bicopter. Also set up the Frame class to 10 and tilt type to 3. Servo 1 and 2 to left and right throttle. Servo 3 and 4 to Front left and Front right (not sure if Servo 3 and 4 are set up correct.
After powering up the vehicle, the ESC beeps continuously. Even though ESC is not calibrated, they should not beep. Can you share your parameters ?
I am using Revo as FC which is compatible with Ardupilot firmware.
Thank you.
Continuous beeping typically means the ESC’s have entered an idle/sleep mode since they aren’t seeing a PWM signal. This can be because the vehicle isn’t armed. It seems like your issue is unrelated to the original post.
From his log file it looks like the the previous user had an issue where the aircraft wanted to correct an increasing “desired yaw” change. This is coupled with the fact that there was steady state roll and yaw errors that saturated the motor outputs and one of the tilt outputs. This comes from benchtop testing where the aircraft can’t correct it’s attitude and results in a continuously increasing throttle, tilt, etc.