Second commit works also for revo-mini master, I think I will do a PR with this.
1 Like
Hi @andyp1per thanks for adding labels on my PR. Could you add labels also for the other PR relative to revo-mini, if you think it’s right?
[Edit: No more than 3 consecutive replies are allowed]
@andyp1per I saw the “Regularize DShot output rates” PR merged, great!
Compliments for the hard work!
Did anything happen about this? Not seen anything in the mail 
@andyp1per I want to try our new luminousbee 5 with beta 4.1 and test the bi-directional dshot, but I don’t know if it needs some modification as you mentioned here: “Supporting bi-directional Dshot requires exclusive use of one or more DMA channels and thus not all versions of ArduPilot support it. Versions that support bi-directional Dshot natively are BeastH7, BeastF7 and KakuteF7Mini, other firmware versions end in “-bdshot” to indicate support for bi-directional Dshot.”
Can you help me on this? Thanks!
here in github: https://github.com/ArduPilot/ardupilot/pull/17199
On H7 its pretty easy to try as there are no DMA restrictions - just add BIDIR to PE11 and PE14 and check that there are no DMA allocation failures in hwdef.h
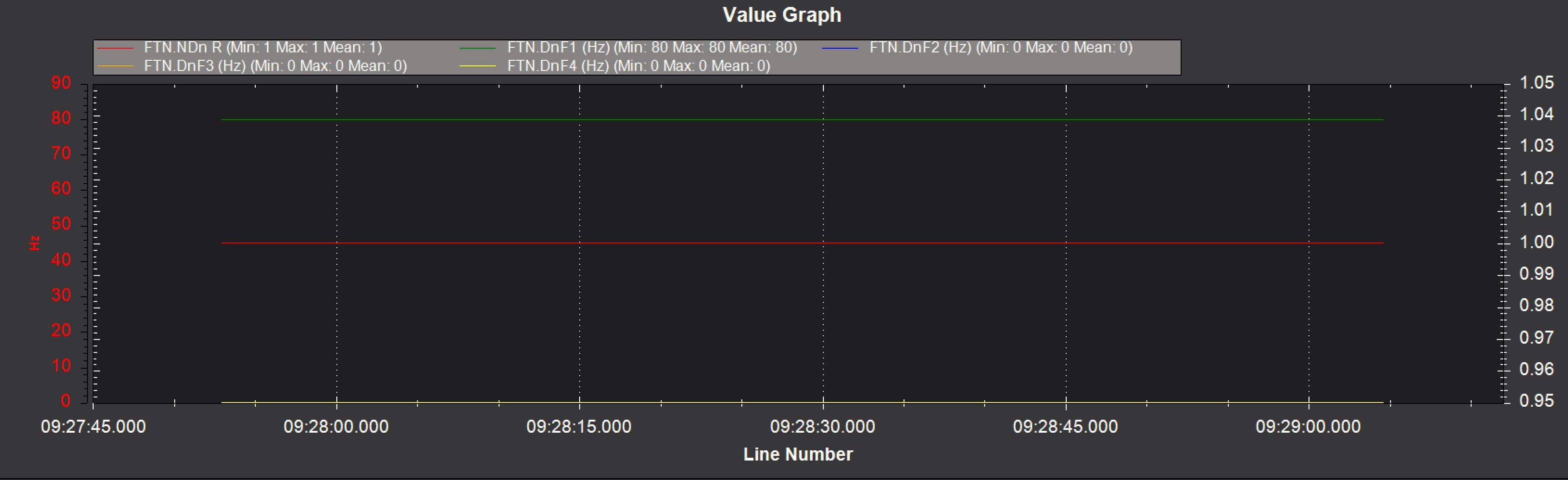
Hi @andyp1per- A continuation of the dialog on Discord. H743-Mini with an Aikon 4-in1 ESC. As discussed Pasthru isn’t reliable but I have tried bdshot again and it doesn’t look like it’s being used for the Notch filter.
Here is standard ESC telemetry:
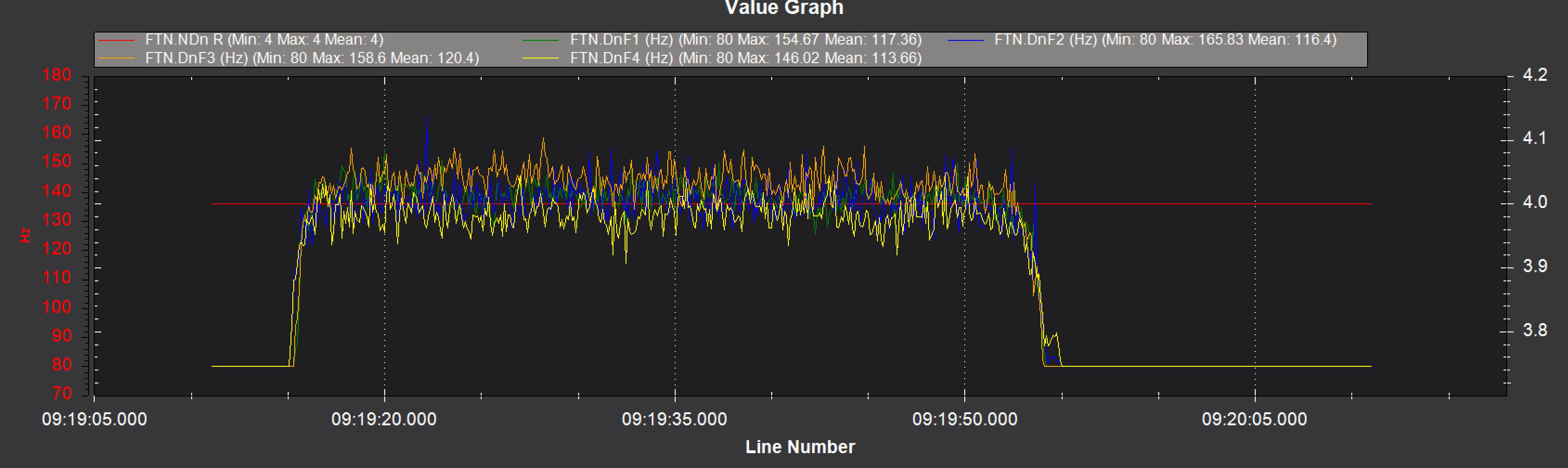
Here is Bdshot configured, all else the same:
Perhaps it’s just something with this ESC.
Can you set TRATE to 0 and see if you get ESC RPM information?
If you set SERVO_BLH_DEBUG = 2 do you get errors?
I posted in discord - I think I have a fix for the passthrough issues
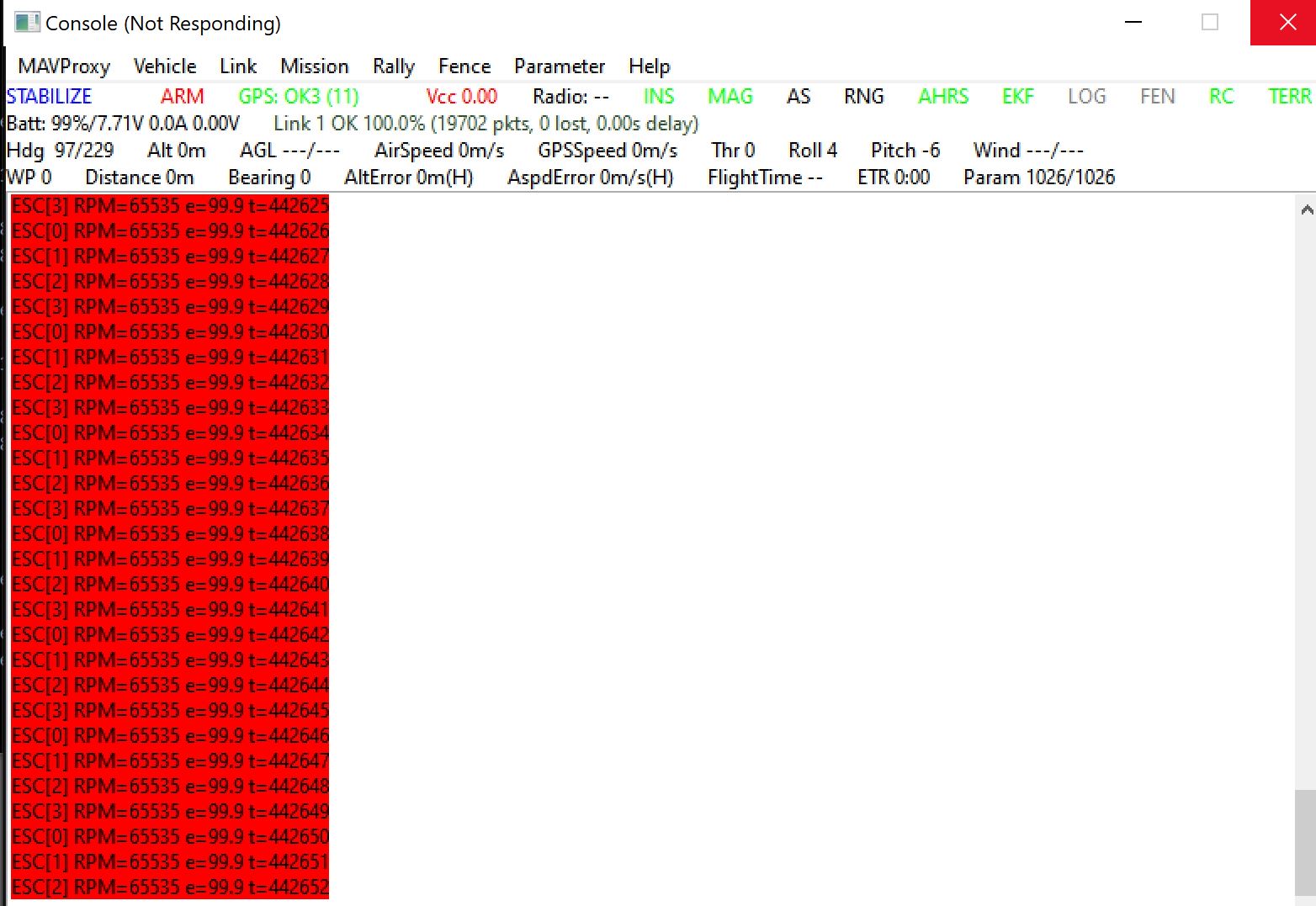
No ESC telemetry with TRATE at 0. Where will I see the error messages with Debug enabled?
I think its on the console so you probably need to use mavproxy. You won’t see data until you do a motortest most likely
Yeah that’s really not working. Can you send me your settings? This is a Matek H743 mini right? My guess is its an ESC problem. What version of BLHeli32 do you have? The ESC is powered presumably?
Yes H743-mini with V32.74 (beta for 32.8). ESC powered, vehicle armed. If you think it’s the ESC version I’ll have to load BF on the board to Flash. Not that big of deal just time to re-configure.
Orpy 5 bdshot.param (18.0 KB)
Or can you build your PR for this FC, I’ll try that to flash the ESC firmware.
Yahoo, passthru works!! I’ll update the ESC’s and get back to testing Bdshot. Thanks a bunch for this Andy!!
1 Like
Dshot 1200 - always a problem. Use Dshot 600 and it will be fine.
Dr Piper, if you were within driving distance I would offer to buy you as many pints as you like  Passthru and bdshot both working.
Passthru and bdshot both working.
1 Like
I have been erroneously thinking that just because I can see the GCR return signal on a Saleae trace and the motors turn that its working - but that is clearly not the case in this instance.
Hello,
would it be possible to add support for 6/8 motors with bi-directional dshot on boards where it’s possible (e.g. H743) or would that break anything else?
Thanks
Sebastian
It’s possible but you won’t see any benefit because the harmonic notch only runs on 4 motors currently
Ah, okay…
So it would only be usable for monitoring… I thought it could be useful to have RPM values for all 6 motors, as I get “yaw imbalance” warnings and I’m not sure yet how to find the reason. So one option I thought about was to compare the actual actual RPM for a given speed.
But as I’m not even sure if that would be helpful I’ll open open a discussion for that, probably other people have a good idea/solution there 
Thanks anyway!