Unless it is a spinner or spraying dropping the load gradually, a sling load should only be dropped from a hover, or by setting the load down then dropping the tow line.
It is important to have the cargo hook at the CG of the helicopter so it is free to maneuver in both axes at all times. Set your maximum bank angle to 20 degrees so you don’t overload the helicopter in turns.
Loiter is ok for slow speed and hovering. In translational lift it is best to use the autopilot in auto mode with a carefully designed flight plan when the helicopter is well out of visual reference. The autopilot will do a better job of keeping the load perpendicular under the helicopter than you can.
Your load will trail the helicopter due to aerodynamic load on it. All speed changing has to be done smoothly. Turns have to be constant rate. Your flight plan and nav controller have to be tuned to achieve this. Your cargo hook should be designed to drop the load in an emergency if it gets out of shape.
Long line loads with 20 to 25 foot tow line work the best at cruise speed of 20 to 30kts. The slower you go, the more unstable it will be. The faster you go, the more power it takes. If you are flying a piston or turbine engine be sure to keep tab on engine temps. If you are flying electric, good idea to put on some sort of sensor to keep track of ESC temp. Long line loads take a lot of power.
Well,
I apologize for being stubborn and going against Chris’ recommendations, but I figured I’d post my results from the test I had to do with my heli so other people can benefit from my experience. It was a success. It certainly helps having such a large piston powered helicopter. I was easily able to hit 20m/s ground speed and shedding about 4 pounds instantaneously during the pass. Arduheli handled it like a champ with no signs of issues (that I can see) after looking at the data logs. We did 4 successful drops. All 20m/s passes were done in loiter mode. My loiter is tuned to come to a pretty gentle stop.
Load was about 5 lbs with about 20 feet of line.
Hovering in the same spot resulted in zero swinging when wind is below 10 mph. However up at altitude it was blowing close to 15 which resulted in some swinging (again, helicopter was not being pulled around much at all because of how well arduheli is).
I’m very happy with the results and would like to thank all the developers and people who have helped me from the beginning of this thread.
I’ve dropped the heli’s own weight before. Amazing it rises less than a meter. Heck, you can see the effect any time you take off or land with a long line load, whenever the load leaves the ground.
Some closed source autopilots would need a parameter change to remove payload on the ground!
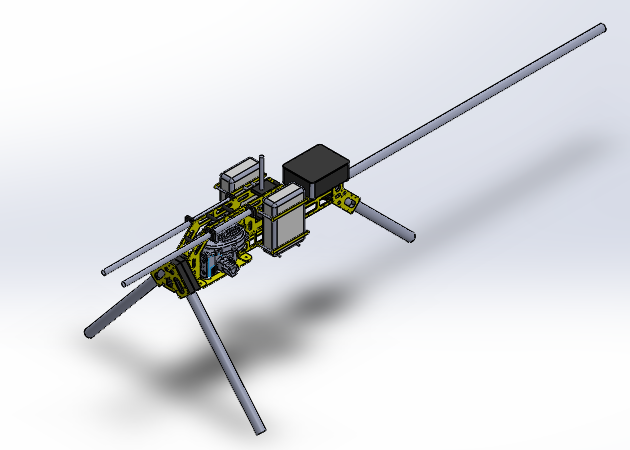
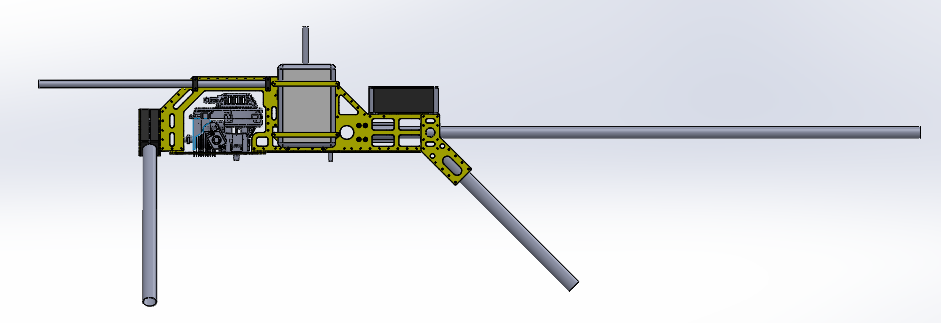
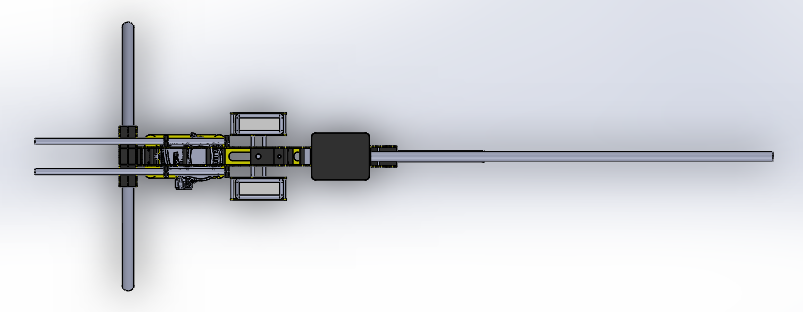
I never liked the layout of the Airstar International frames. I’m hoping with my design I’ll have a little more freedom with mounting accessories and payloads while keeping CG balanced. Plan is to cut 1/8" or even 3/16" G-10 material for the frame. I want this to be super tough knowing how big it is.
Hey @ChrisOlson🙋🏼♂️
How about the Pixhawk 4 mini? I’m confused about IMU dampening as I read my pixhawk cube have just one dampened IMU. Pixhack V3 is equipped with 3 dampened IMU. Did you have some information about Pixhawk 4 Mini? I’m looking for an Gasser FC so your Help would be great!
I looked at this one briefly in the past and never read anything about it having internally damped IMUs. Otherwise it looks very similar to the CUAV V3.
After what I’ve been through in this thread, I’m sticking with the CUAV V3 even on future helicopters. Or at least until someone proves there is a better one for me. There is now the V3X which is supposedly better. I think Chris Olson has a couple of these that work very well for him.
Thank you @Chris_Khosravi!
I think I let the Pixhawk Cube rest for other wing or Multicopter Projects.
It make sense to trust other users experience with pixhack v3. I’ve checked some Stores here in EU but seems like only chance is to order one in Chinese Stores:face_with_raised_eyebrow:
Matthias,
I replaced a new Pixhawk cube with a new pixhackv3x.
That pixhack v3 is better suited with Helis than other FC. No problems for me to get that with Aliexpress store.
Look up what others write about their experiencing.
@Chris_Khosravi, did you have some another advices for me in sight of external dampening/ mounting the pixhack unit like moon gel or “milton mod” stuff? I’m familar with vibrations on my zenoah gasser:woozy_face:
If you have access to a 3D printer I can give some guidance. I ended up designing and 3D printing my own dampening system. Took several iterations but I got it pretty good now. All 3 accelerometer axis under 10 m/s/s.
I don’t know that I’d recommend velcro, but I have never used it for a flight controller. Maybe the dual lock fastener. That seems a little more rigid. I just mounted my CUAV V5 using thin double sided rubber tape.
are you guys notice any difference by mounting the FC in front near the gas engine or over the tail boom joiner? I’m not sure where to install my pixhack V3x unit…
I have only ever mounted mine in the front. I’m about 300mm in front of the main shaft and I haven’t seen any issues yet. My new scratch-built design will get the autopilot closer to the main shaft, probably about 150mm away, except this time behind it.