Did another test hop today in my backyard. Flew with the recommended 3.6 parameters. Seems to fly better, but hard to tell since I haven’t done any real flying in a larger field.
One thing to note, I changed the default hover roll trim of 300 centidegrees to 0 and it seems to help. Is this because my rotor head rotates counter clockwise? If so, will -300 be what I should use? QGC shows the min value to not exceed 0, but obviously we can do the “manual input”.
HI Chris
for my own understanding please , new to Traditional heli, you are not running a a separate flybarless controller and the Pixhack V5 is running the control. Many thanks to you and Chris Olson and others for a really interesting thread on large helis
Hi Chris, what is the chord on your 1200mm blades Please, thanks in advance
Hi Garth,
I don’t remember the chord on the 1200mm blades I used to have because I sold them a while ago and I don’t remember the brand. However this is the blade I plan to run from here on out:
https://spinblades.com/Scale-asymmetrical-blades-size-1050-mm-counterclock-65mm-wide
Hi Chris
many thanks will send pics when I have done mine
Can confirm that having a hover roll trim of -300 centidegrees works for a counter-clockwise (LH) rotor head. No longer needs input to keep the heli from drifting.
I’m still experimenting with the autopilot mounting. It works as-is but I know I can do better. Can keep X-axis within 10Gs, Y-axis within 15-20Gs, and Z-axis is 25-30Gs. Need to work on fine tuning the heli to limit vibrations too. I’m getting the tail bobbing which seems to point to the headspeed being on the low side. I haven’t actually measured the rotor speed yet but it sounds and feels like plenty at the moment. Maybe once I load the heli up and increase the rotor speed it will get better…at least I hope.
1 Like
Vibration Update:
X-Axis: ~5
Y-Axis: ~7
Z-Axis: ~15
I think that’s about as best as I can do for now.
Yeah, tracking the blades, finding the sweet spot where the engine likes to run, getting the gearing right, all will contribute to a smooth-running helicopter. With big pistons and turbines I don’t get too excited about what they do on the ground. Even full size heli’s with everything balanced right shake and dance, rock and roll and do the boogie woogie until everything comes up to speed and smooths out. After the heli lifts off it’s nice if everything is below 10 on all three axes but as long as it don’t clip the IMU’s in flight it’s usually fine.
If ArduPilot would not mess with the attitude situation on the ground, and just use pilot stick inputs until it becomes airborne, it would be better for big piston heli’s. Especially in cold weather pistons can require a ground run of two minutes or better at flight idle to warm up so they’ll take throttle without coughing. I recently found out the EKF doesn’t like this when the engine is still cold and running rough, you got lead/lag regressive causing issues, and it can screw up the attitude solution and try to tip the heli on the ground in Stabilize. Which then sends it into ground resonance when it climbs on one skid and really makes it interesting because it doesn’t respond to pilot control input.
Even Acro is a little wonky in this regard because if it screws up the attitude solution you have to hunt around with the cyclic to find out where the “ghost aircraft” went to. I wish ArduPilot just had direct stick to swash on the ground so the pilot actually has full control of the machine until it becomes airborne.
1 Like
Cant agree more Chris.
In my probably 100 spool ups by now, I have seen some crazy vibes. Occasionally I would get IMU clipping before getting airborne if it hits ground resonance.
But now I have the engine finely tuned, the throttle curve at a good spot, and the blade tracking perfected. Next flights will be in much more open space rather than my backyard. I never dared to switch into any other mode besides stabilize lol.
Yeah, with the little heli’s the code has been developed on in the past ground resonance and combustion engines was not well thought-out. But big heli’s are every bit as susceptible to ground resonance issues as full size ones are due to the heavy blade mass. You can shut a big heli down and then lift it off again in autorotation and fly it to a different spot with no power.
So we’re trying to identify and fix these problems as they appear for the more advanced machines that are common in UAV rotary wing’s. And a lot of these things won’t affect the hobbiest pilots, or experimenters, flying smaller machines because they won’t notice the changes anyway.
This is my latest flight log: Google Drive Link
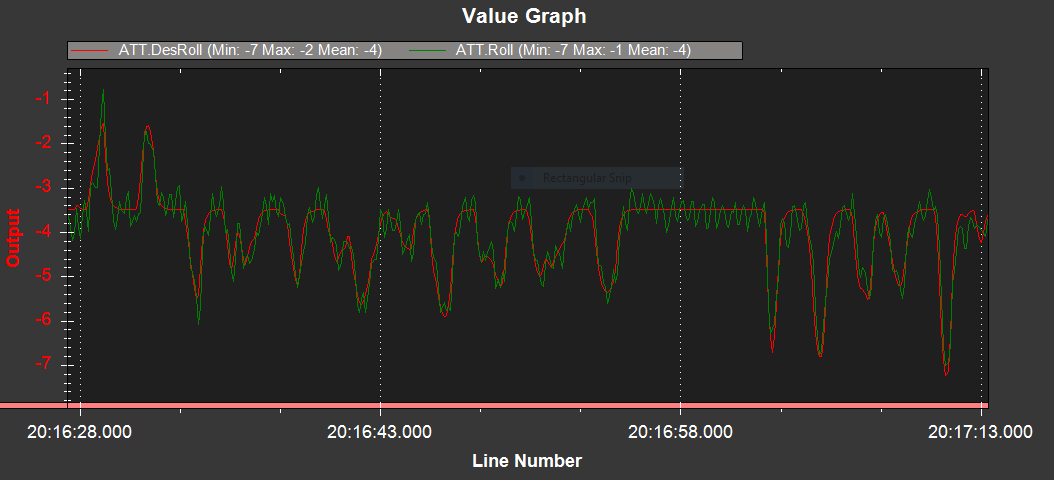
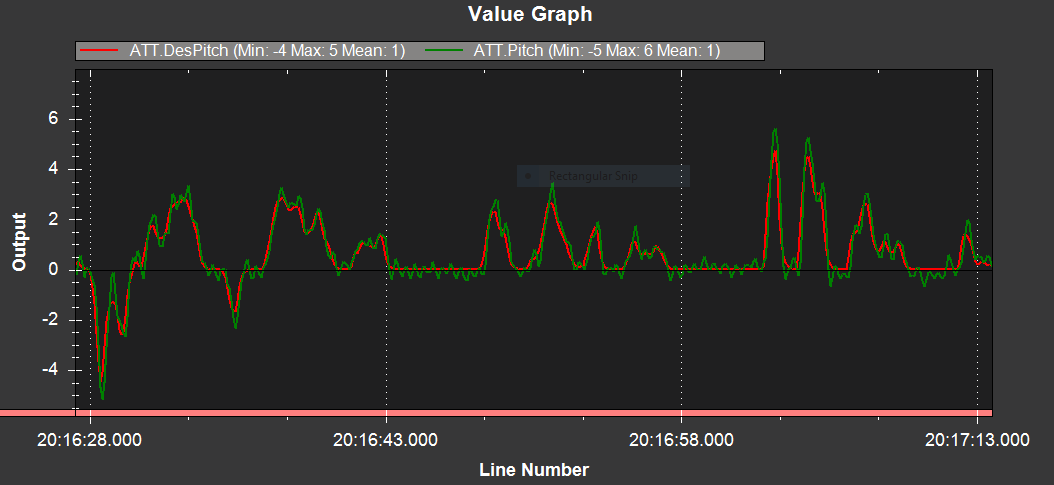
CG Is still not correct, so you’ll see a pitch/des_pitch offset. There’s also an offset on roll, I either don’t have the hover_roll tilt parameter aggressive enough or my swash is not as level as it should be. (Currently at -300 centidegrees for -3 degrees - for CCW rotorhead)
I’m still a newbie at viewing logs, is there anything that looks bad before I start trying altitude hold modes?
I don’t see anything bad, Chris. I wouldn’t be afraid to try it in Alt Hold.
@Chris_Khosravi I don’t know about your CG but I would suggest increasing your ILMI in both pitch and roll. The controller does not have enough authority to drive the desired and actual attitude to be the same. I think you need to set ILMI in pitch and roll to 0.1 to get the actual and desired values to line up. If you find the aircraft drifting once you’ve married up the desired and actual values for pitch then you may consider adjusting the CG or trim pitch attitude for the pitch axis. For the roll axis then you could adjust the Hover roll Trim parameter.
Hi Bill,
I am definitely running tail heavy right now. I have no payload up front, and the huge UAV fiberglass canopy isn’t installed yet (when I lift the heli by the head the tail droops a bit). I’m going to revisit swash leveling this weekend then try your suggestion on increasing ILMI values.
Thanks for all the help guys!
That’s actually the way I fly all my heli’s is with aft CG. I don’t balance them because they get too “twitchy”. My aux fuel tanks are always installed at a station slightly aft of the mast, so when they take off they have significant rearward CG. As it burns off fuel the CG moves ahead but still remains slightly aft at minimum fuel.
This has never caused a problem that I can tell flying in manual flight modes because you use whatever cyclic it takes to hover it. In auto flight mode it doesn’t seem to care. But my helicopters are overall more stable with the aft CG arrangement than they are if perfectly balanced.
I modified my heli’s a bit so they have a slight amount of forward rotor tilt like an AgustaWestland A109. I had to bevel the tail transmission drive gear a bit to do that (it is a steel gear, not plastic).
If you run with the CG slightly forward, then it’s harder to manually flare for landing, as the helicopter does not seem to want to achieve a natural nose-high attitude. But most RC models have so much cyclic authority compared to full-size machines that they will handle a pretty wide CG range that a lot of full-size heli’s won’t. An example is that I can lift 10lb weight on a sling load with the sling tied to the LF of the landing gear skid on a 766 and hover with it. And that’s half the empty weight of the helicopter. No way a full-size heli can do that - the full size will run out of cyclic.
@Chris_Khosravi I looked at the picture of your Mongoose and that is a different type of layout. I’m guessing tail heavy due to the stretch boom to swing 1200 blades. I see the fuel tank is front mounted and must be adjustable fore and aft on that rail.
If it were me I would tune it according to like Bill said, and do it empty with no payload dummy weights or anything, and with minimum fuel. I never like tuning a helicopter with payload installed, especially liquid fueled machines that may carry aux tanks and have a difference in takeoff weight to landing weight of 6-7 lbs due to fuel burn. If you over-tune it because it’s loaded, then burn off 7 lbs of fuel it may become unstable.
My experience is that if you get everything set the way you like at minimum takeoff weight, and within the CG station limits you plan to fly it with, you will get the best results when loaded. Then load it like you would any manned machine - hang payload and fuel load on it to stay within reasonable CG limits, but don’t do any further tuning on it just because it’s loaded. That is one area where these big piston machines differ from electrics. The piston machines can usually carry their own weight in payload, and weight and CG changes in flight due to fuel burn. Yeah, it may handle a bit more sluggish at maximum takeoff weight, but they all do. So do airplanes. That’s why there is operational limitations at maximum takeoff weight vs landing weight, and some aircraft even have to dump fuel to get down to maximum landing weight if an emergency landing is required right after takeoff.
I’ve found ArduPilot handles this quite well with fuel helicopters - as long as you don’t over-tune it and accept the fact that the autopilot is not qualified to land it take off by itself. And accept the fact that when you fly it it’s going to handle different at maximum vs minimum takeoff weight.
In other words, the “theory” about driving actual attitude to desired can be applied at minimum takeoff weight and tuning. It will not apply once you load the helicopter and start flying it in the real world. It is what it is once you load it down.
The pictures above are pretty outdated (when I used to fly these without autopilot or flybarless controller).
I now fly with aux tanks mounted at the CG.
The battery straps are for the avionics battery.
I’m still terrible at taking pictures but you can see how the new setup is:

1 Like
Yeah, the nice thing is, you can move that stuff around. So I would do like Bill suggested and tune it at minimum takeoff weight with CG within a range you intend to fly. Then when you load it pay attention to CG and put stuff where it keeps the CG within the flight envelope. As long as you can adjust CG to make it tail heavy or nose heavy to get the flight characteristics you want, it won’t be a big deal later.
Side to side CG on helicopters is not even in the flight manuals for most full size ones. Unless they have a side hoist. Otherwise a fellow can hang out the side on a work platform and work on powerlines off the side of the helicopter while the pilot hovers it, and it doesn’t affect 'em. Many times they’ll put a counter-weight on the other side to make it easier for the pilot to hover it. But helicopters rarely run out cyclic on roll. And I’ve found RC ones are no different in that regard.
Yes luckily I do have lots of room for moving things around. Although I’ll be honest and say I’m not a huge fan of the frame layout that Airstar International did with this one. Also don’t feel good about the fact that the company doesn’t exist anymore. Because of this, I started slowly spec’ing out the parts to convert this thing over to more readily available parts like Align and design my own frame. I believe a Trex 700/800 rotor head should be able to handle 1000 sized blades at around 1000 RPM. It’s just a matter of coming up with a transmission system similar to Airstar that can adapt to Align while keeping an appropriate gear ratio. I’ve designed and CNC cut my own purpose-built aerial photography heli several years ago, so I feel like with enough time, I can do the same for this one.

1 Like